机器学习
机器学习
考试
- 选择
- 判断
- 简答
- 简答
- 综合
Introduction
什么是机器学习?
“Machine Learning is fields of study that gives computers the ability to learn without being explicitly programmed.”
机器学习是这样的领域,它赋予计算机 学习的能力,(这种学习能力)不是通 过显著式编程获得的。
非显著式编程
– 让计算机自己总结规律的编程方法
– 通过数据、经验自动地学习,完成给定任务
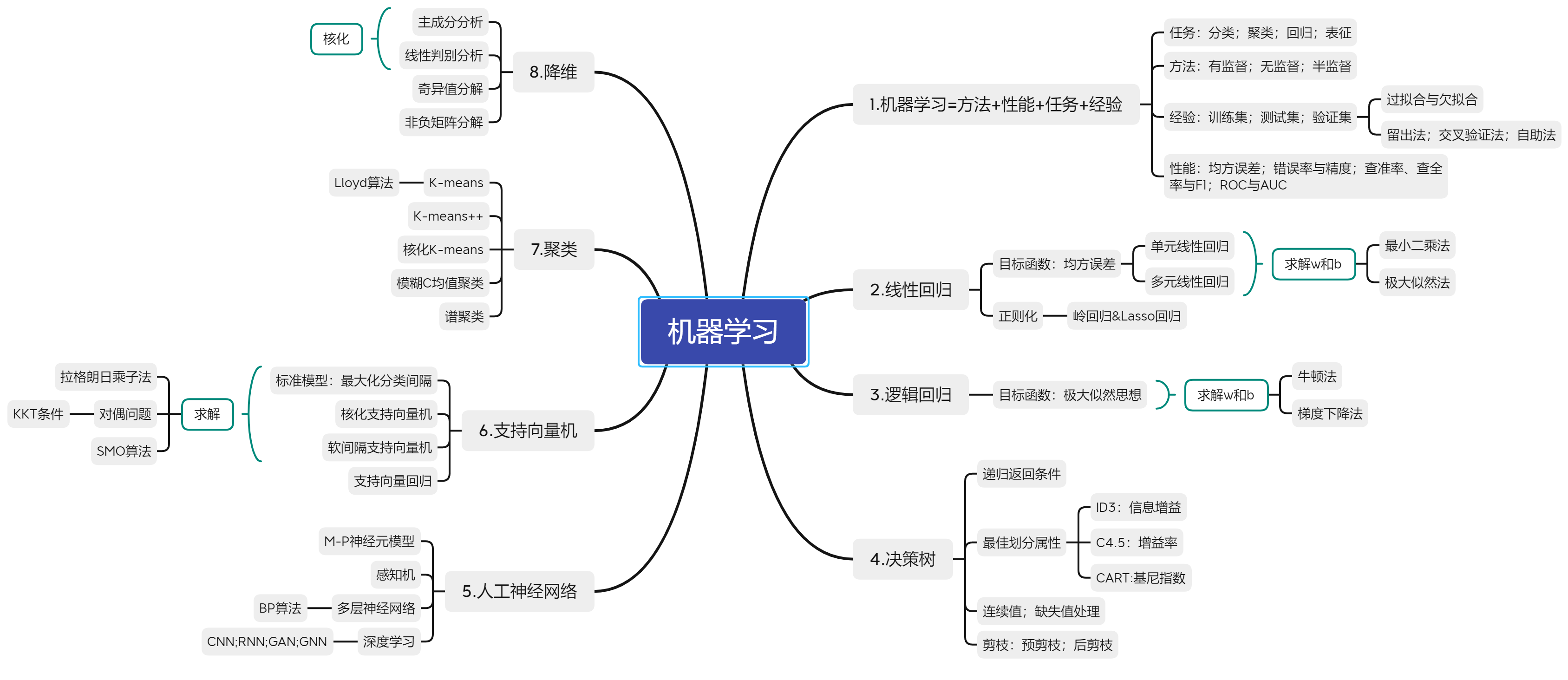
机器学习=方法+性能+任务+经验
• 方法-A: 各种机器学习方法
• 任务-T:机器学习要解决的问题
• 性能-P:方法针对任务的性能评估准则
• 经验-E:训练模型的数据,实例
对于T,A的选择相对灵活,也是机器学习课程主要学习 的内容,P是评价A在解决T的性能指标,E是机器学习动 力与源泉。
一个计算机程序被称为可以学习,是指它能够针对某个T 和某个P,从E中学习。这种学习的特点是,它在T上的被 P所衡量的性能,会随着E的增加而提高。
T:编写计算机程序识别菊花和玫瑰
– A:某种机器学习算法
– P:识别的正确率(识别率)
– E:一大堆菊花和玫瑰的图片(训练样本)
T:人脸识别
– A:线性回归
– P:人脸识别准确率
– E:已标定身份的人脸图片数据
T:象棋博弈
– A: 人工神经网络
– P: 对随机对手的获胜比率
– E: 指令化棋谱
T:股价预测
– A: 多项式回归
– P: 估价误差(方差)
– E: 不同股票近三年各交易日股价数据
Fundamental Task
机器学习基本任务:
离散值
分类(Classification)
- 分类(图像、视频、文本………)
- 识别(语音、人脸、指纹…….)
- 检测(行人、车辆、军事目标…….)
聚类(Clustering)
- 分割(图像、视频)、背景建模
- 数据挖掘
- 字典学习(视觉信息,文本)
连续值
- 回归(Regression)
- 年龄估计
- 形状分析、表情分析、运动分析等
- 表征(Representation)
- 特征提取(便于前三个任务解决)
- 数据重构, 图像处理
- 信息检索
Experience
经验E是由人工采集并输入计算机
经验E是由计算机与环境互动产生
Approaches
方法分类(根据学习形式)
- 有监督学习(Supervised Learning)
- 数据都有明确的标签,根据机器学习产生的模型 可以将新数据分到一个明确的类或得到一个预测 值。
- 支持向量机、贝叶斯分类器、决策树、线性判别分析…….
- 无监督学习(Unsupervised Learning)
- 数据没有标签,机器学习出的模型是从数据中提取出来的模式(提取决定性特征或者聚类等)
- K均值、Meanshift、主成分分析、典型相关分析 ……
- 半监督学习(Semi-supervised Learning)
- 部分数据有明确的标签,根据机器学习产生的模 型可以将新数据分到一个明确的类或得到一个预 测值。
- 图直推学习、超图直推学习……
无监督学习
需要假设:
- 同一类的训练数据在空间中距离更近
- 利用样本空间信息
- 设计算法将他们聚集为两类
- 实现无监督学习
性能度量与评估
The Performance measure and evaluation of machine learning approaches
Experiences(经验)
Experience = The data we have for training the machine learning model.
对于特定机器学习任务,已存在的可利 用数据即是解决该机器学习任务的经验。
数据为王:大数据=丰富经验=训练更好的机器学习模型
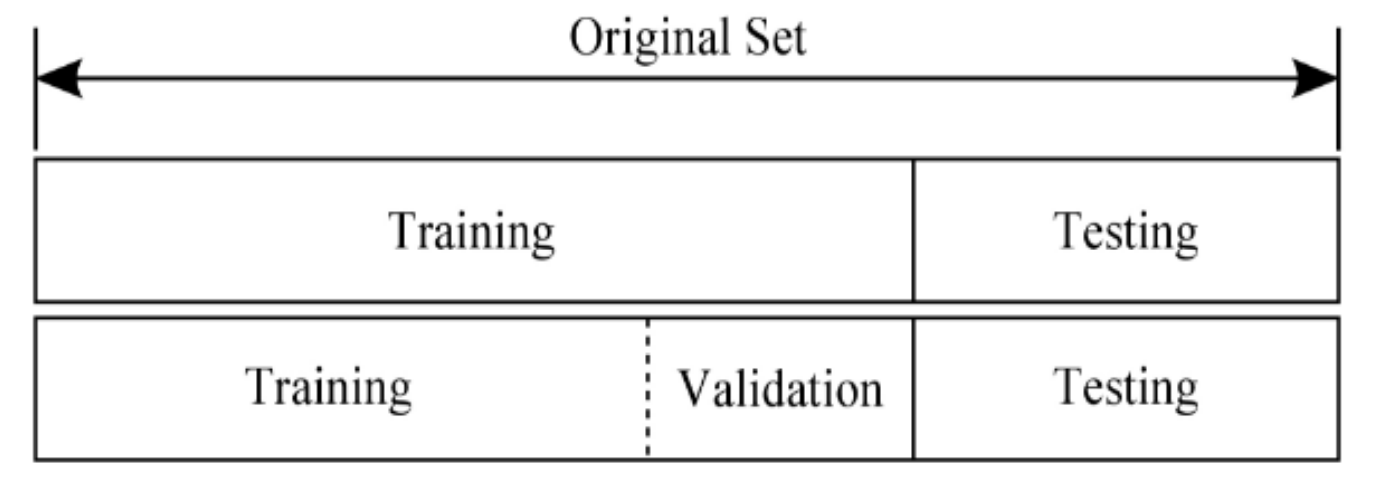
数据划分
- 训练集(Training Set)
- 用来训练模型或确定模型参数。
- 测试集(Testing Set)
- 测试已经训练好的模型的推广能力。
- 验证集(Validation set)可选
- 用来做模型选择(model selection),即做模型的最 终优化及确定的。
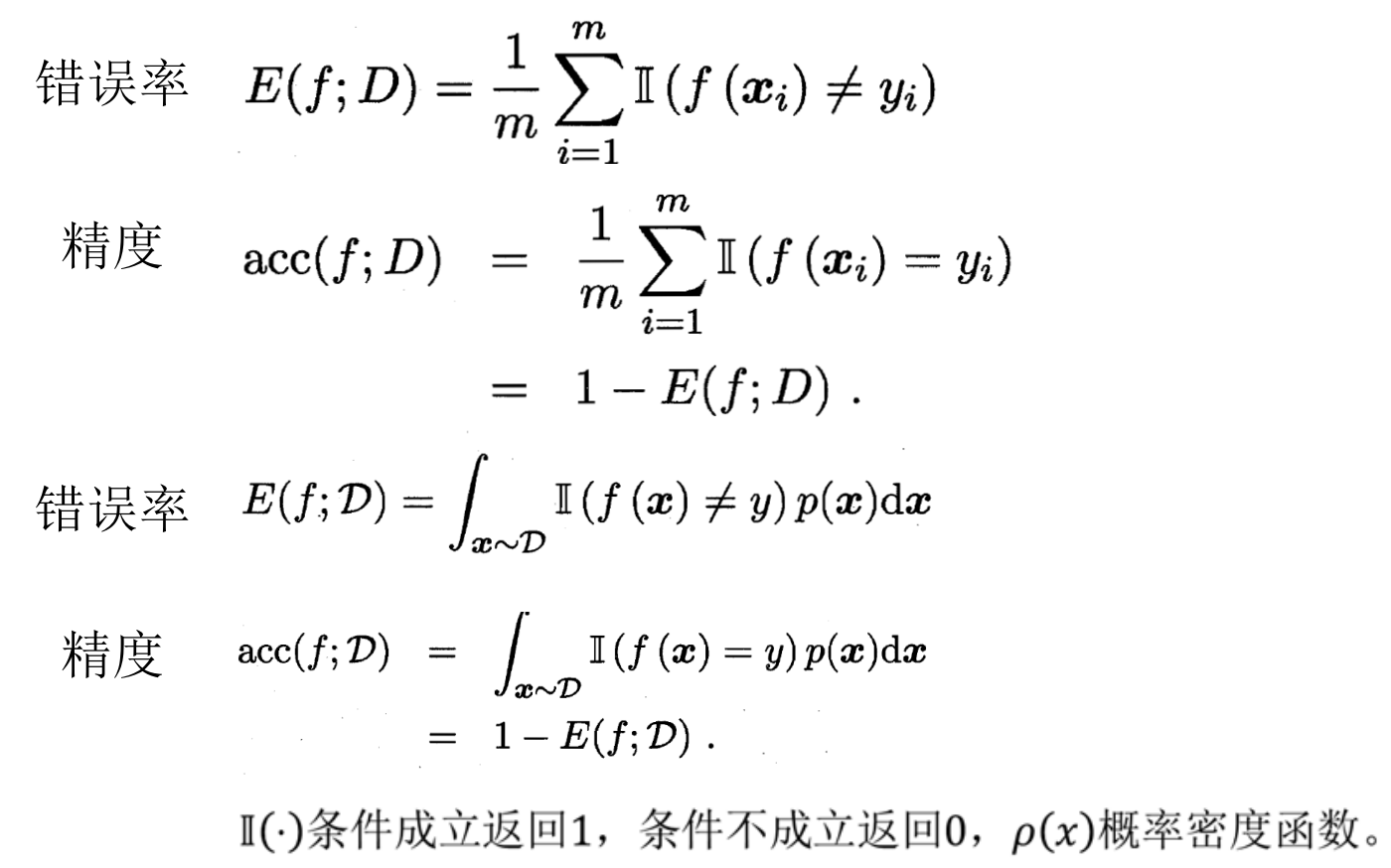
误差与精度
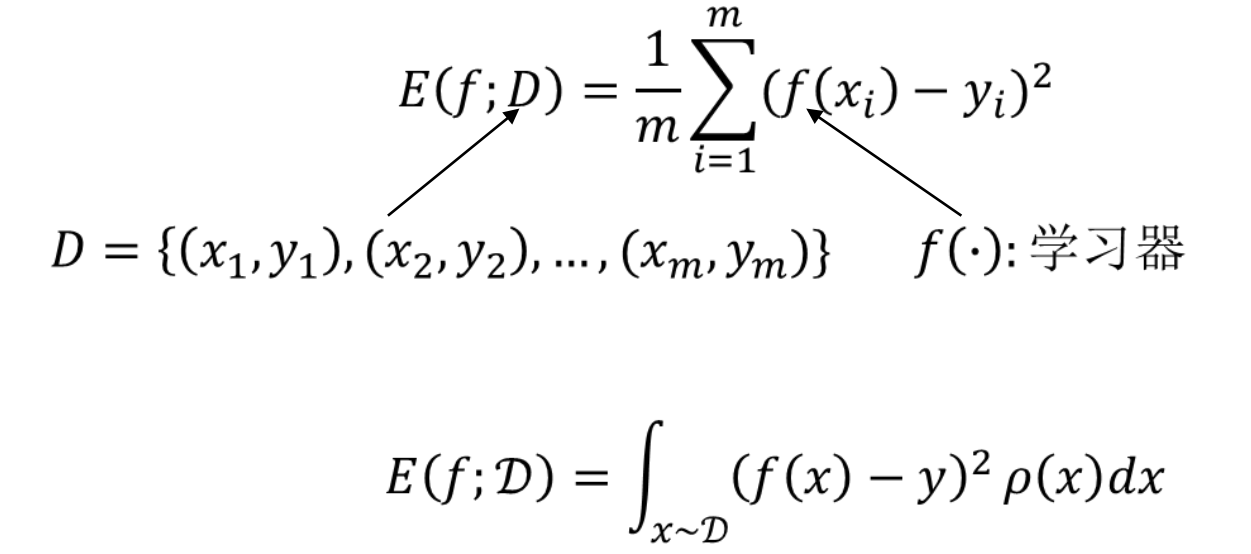
- 误差(error):学习器(Learner)的实际预测输出与样本的真实输出之间的差异。
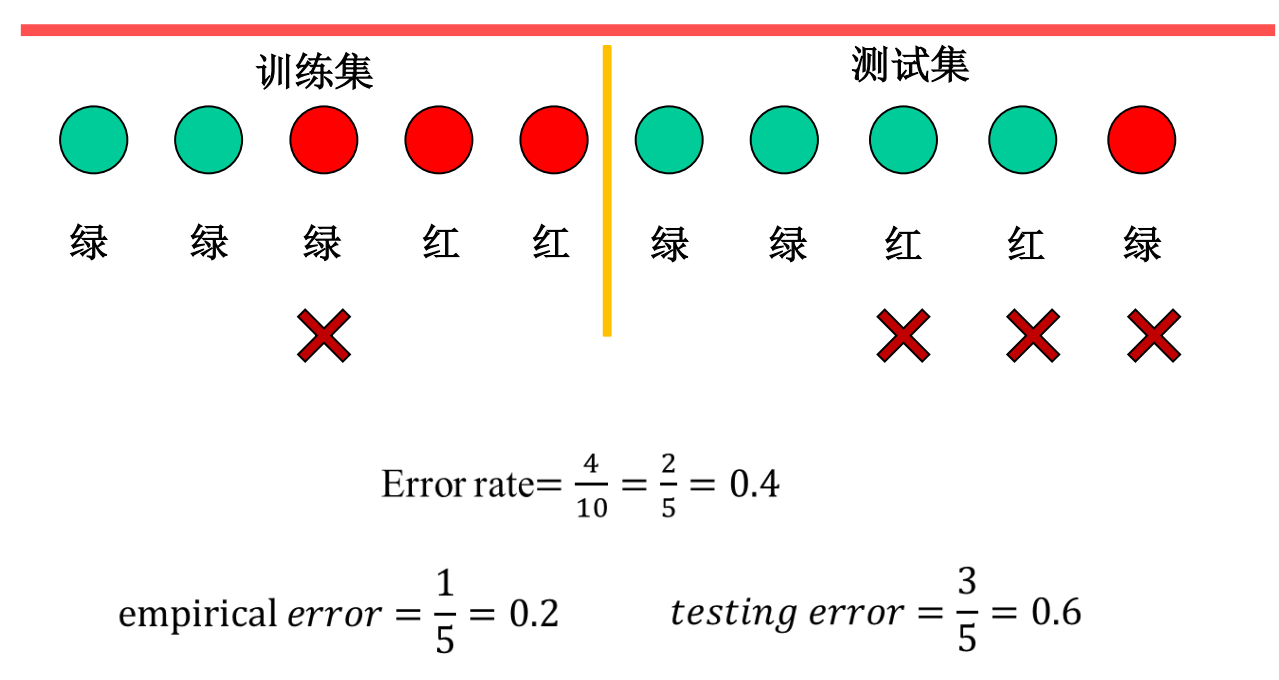
- 错误率(error rate): 被错误分类的样本在总样本中的比例。
- 精度(accuracy):被正确分类的样本在总样本中的比例,即。
- 训练误差(training error):学习器在训练集上的误差。
- 经验误差(empirical error):即训练误差
- 泛化误差(generalization error): 在新样本的误差,实际误差!
- 测试误差(Testing Error) :学习器在测试集上的误差,用来近似泛化误差。
希望得到泛化误差小的学习器,然而,我们事先并不知 道新样本什么样,实际能做的是努力使经验误差最小化。
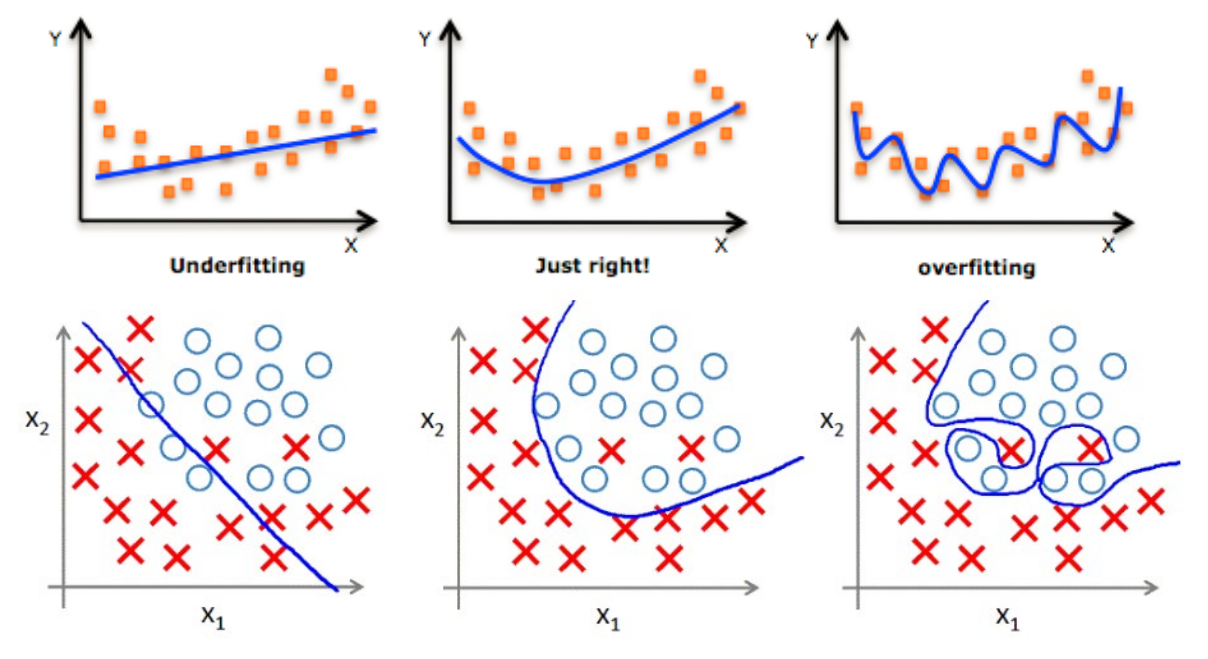
过拟合和欠拟合
过拟合(Overfitting): 为了得到一致假设而使假设变得过度严格。
欠拟合(Underfitting): 模型没有很好地捕捉到数据特征,不能够很好地拟合数据
数据集划分策略
利用测试集或验证集评估学习器的泛化误差,进而进行模型优化与选择,避免过拟合。
常见的划分策略
- 留出法
- 直接将数据集D划分为两个互斥集合
- 测试\训练集划分尽量保持数据分布一致性
- 采用合理的采样,合理地控制训练集与测试 集的比例。
- 多次使用留出法,重复进行实验评估并求均 值,减少数据分布差异造成的偏差。
- 交叉验证法
- 把数据集等 分为n份相互不重叠的子集,每次以其中1份子集作为 测试集,其余n-1份子集作为训练集,重复n次,直至 所有子集都作为测试集进行过一次实验评估,最后返 回n次实验评估的平均结果。
- 交叉验证是最常见数据集划分方法。
- 留一法(Leave-One-Out,简称LOO):特殊的交叉验 证法,每个被划分的子集只有一个样本。
- 优点: • 训练集比例高,训练出来模型与用所有数据进行训练的模 型相似度高。
- 缺点: • 评估开销大 • 测试集比例太低,模型调参不便。
- 自助法
- 假设一个由m个样本组成数据集D,对其进行m次随机采样构造一个由m个样本组成 新数据集D’, 由于m次随机采样可能会对D中部分样本 重复采样,所以D’中有部分样本是完全相同,而D中 有部分样本是没有被采样到数据集D’中。因此我们可 以把D中这部分没有被采样到样本D\D’构造测试集, 而D’作为训练集。
- 这种没被采样到样本在数据集D中比例一般占 25%~36.8%之间。
- 自助法通常用于数据集较小或难以有效划分训练/测试集情况。
数据集划分各子集之间不能有重合
没有免费午餐定理
– 无论学习算法𝔏a多聪明、学习算法𝔏𝑏𝑏 多笨拙,它们 的期望性能竟然相同!
– 任何一个预测函数,如果在一些训练样本上表现好 ,那么必然在另一些训练样本上表现不好,如果不 对数据在特征空间的先验分布有一定假设,那么表 现好的与表现不好的情况一样多。
在设计机器学习算法时有一个假设: 在特征空间上距离接近的样本,他 们属于同一个类别的概率会更高
常见性能度量
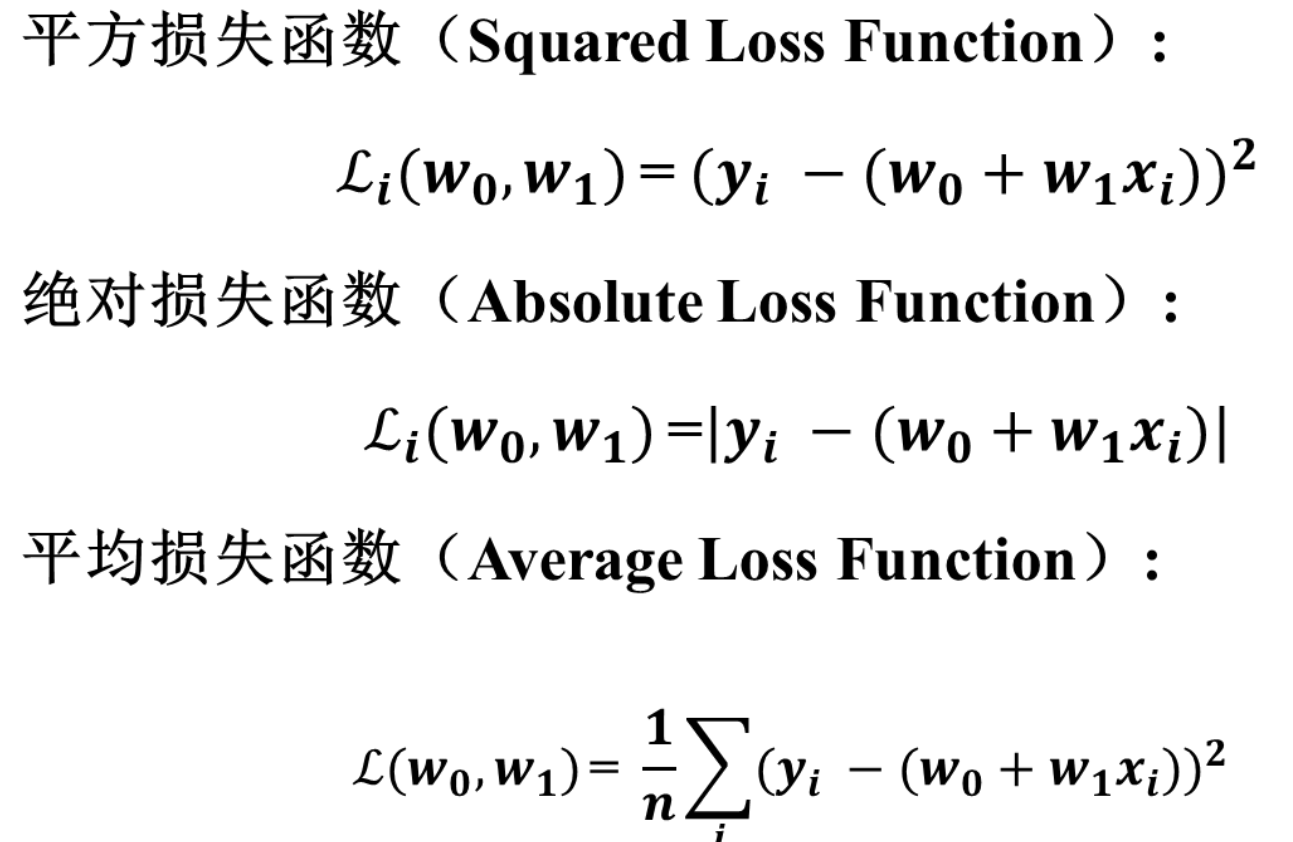
– 均方误差
– 错误率与精度
– 查准率、查全率与F1
– ROC与AUC

均方误差(mean squared error)
- 多用于度量学习器解决回归任务的性能
错误率与精度
- 多用于评估分类任务的性能
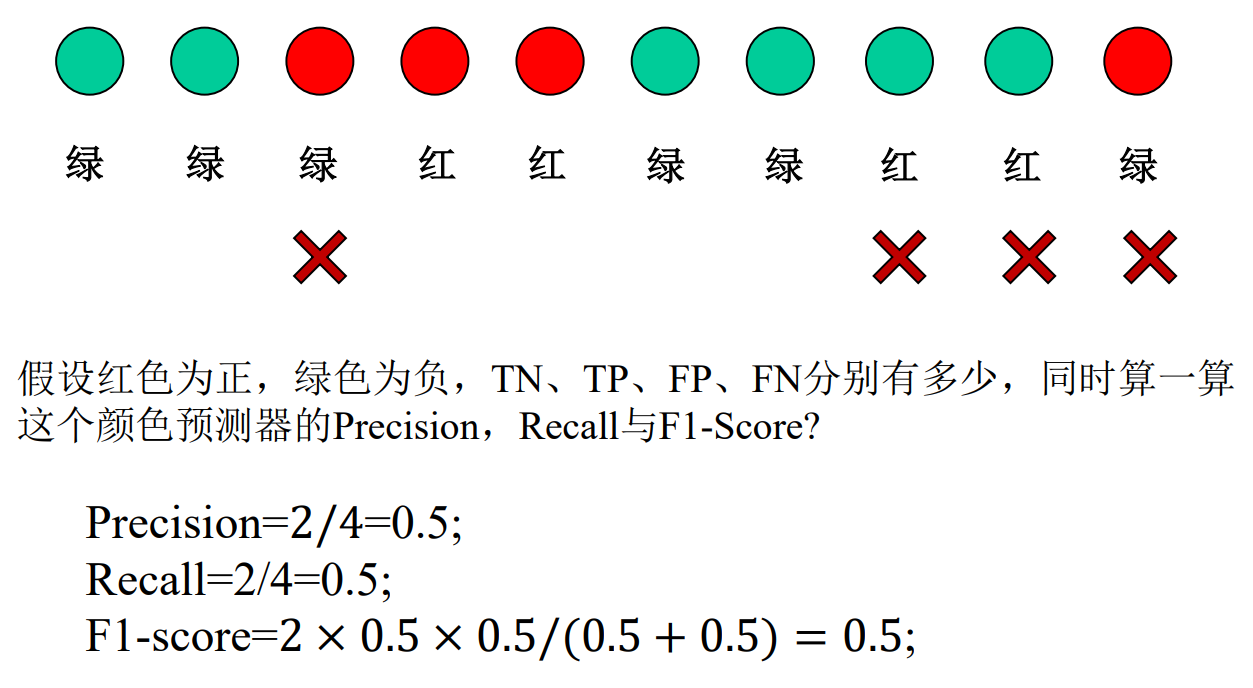
查准率、查全率、F1
- 查准率(Precision)
- 被正确分类的正例样本占所有被分类为正例样本的比例
- 查全率(Recall)
- 被正确分类的正例样本占所有正例样本的比例
- 查全率与查准率是一对相互矛盾的度量
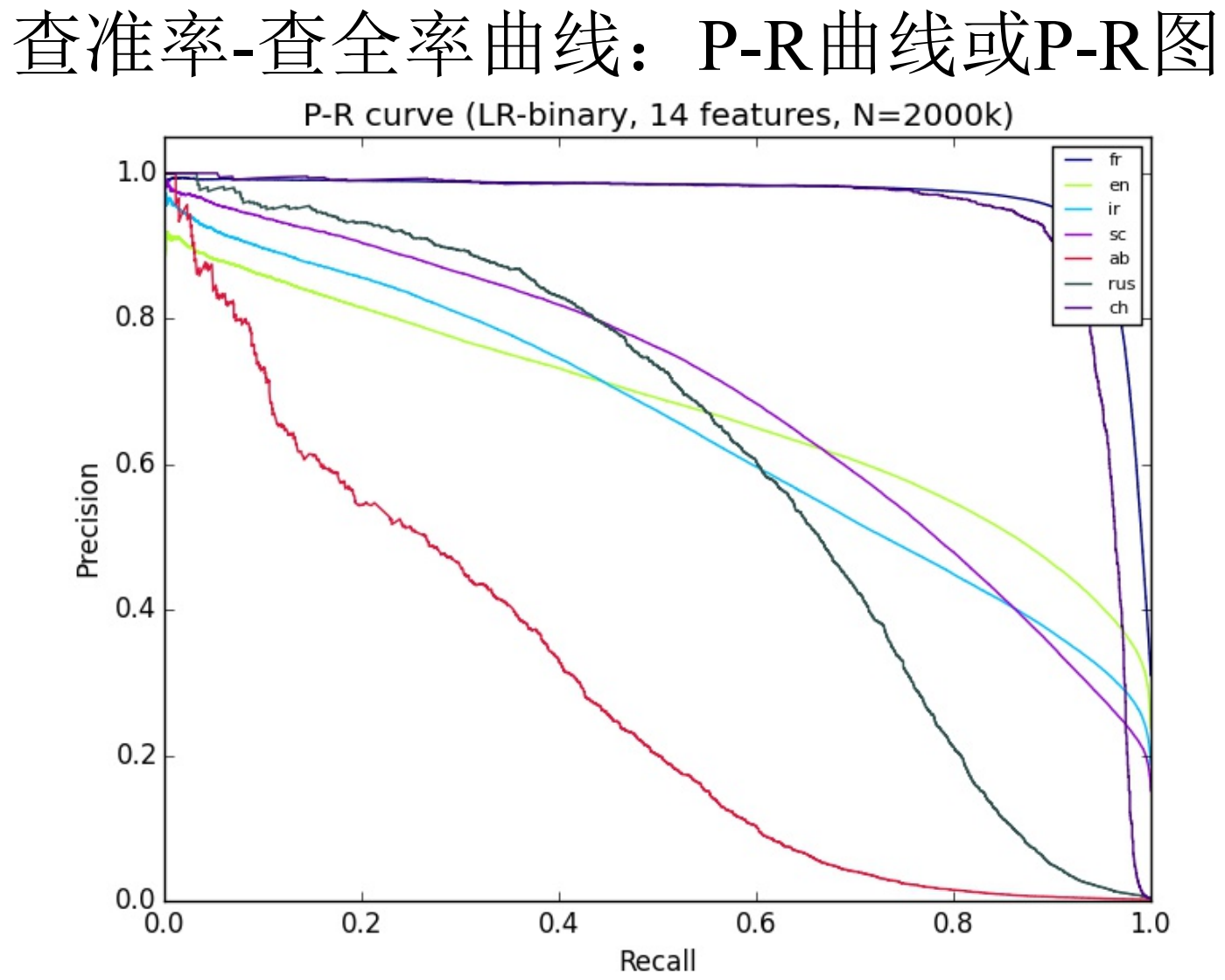
基于查准率-查全率的学习器性能度量:
平衡点(Break-Even Point, 简称BEP)
查准率等于查全率
查准率和查全率的 调和平均
- 多用于评估检索与检测任务的性能
二分类问题的性能度量探讨:
根据置信度对样本进行降序排序,一个泛化性能较强的学 习器应该满足一下特征:
正例拥有高置信度,因此排序的 排列比较靠前,负例拥有置信度较低,排名应靠后。
受试者工作特征(Receiver Operating Characteristic, 简称ROC )曲线:
真正例率(True Positive Rate, 简称TPR)—查全率
假正例率(False Positive Rate,简称FPR)
AUC
- ROC曲线下的面积
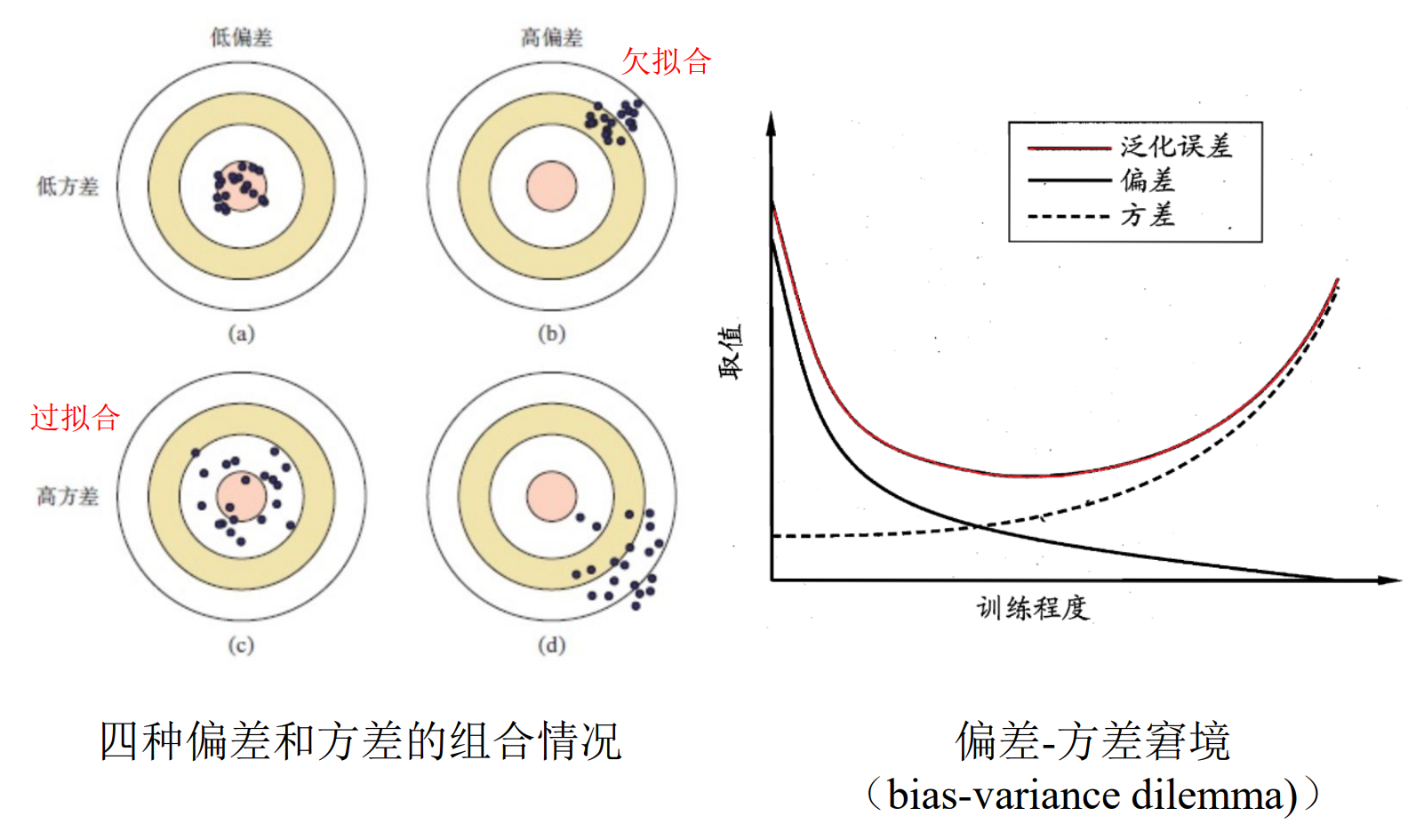
偏差与方差
- 偏差:度量了学习算法的期望预测与真实结果的偏离程度,即刻画了学习算法本身的拟合能力。
- 方差:度量了同样大小的训练集的变动所导致的学习性能的变化,即刻画了数据扰动所造成的影响。
- 表达了在当前任务上任何学习算法所能达到的期 望泛化误差的下界,即刻画了学习问题本身的难度。
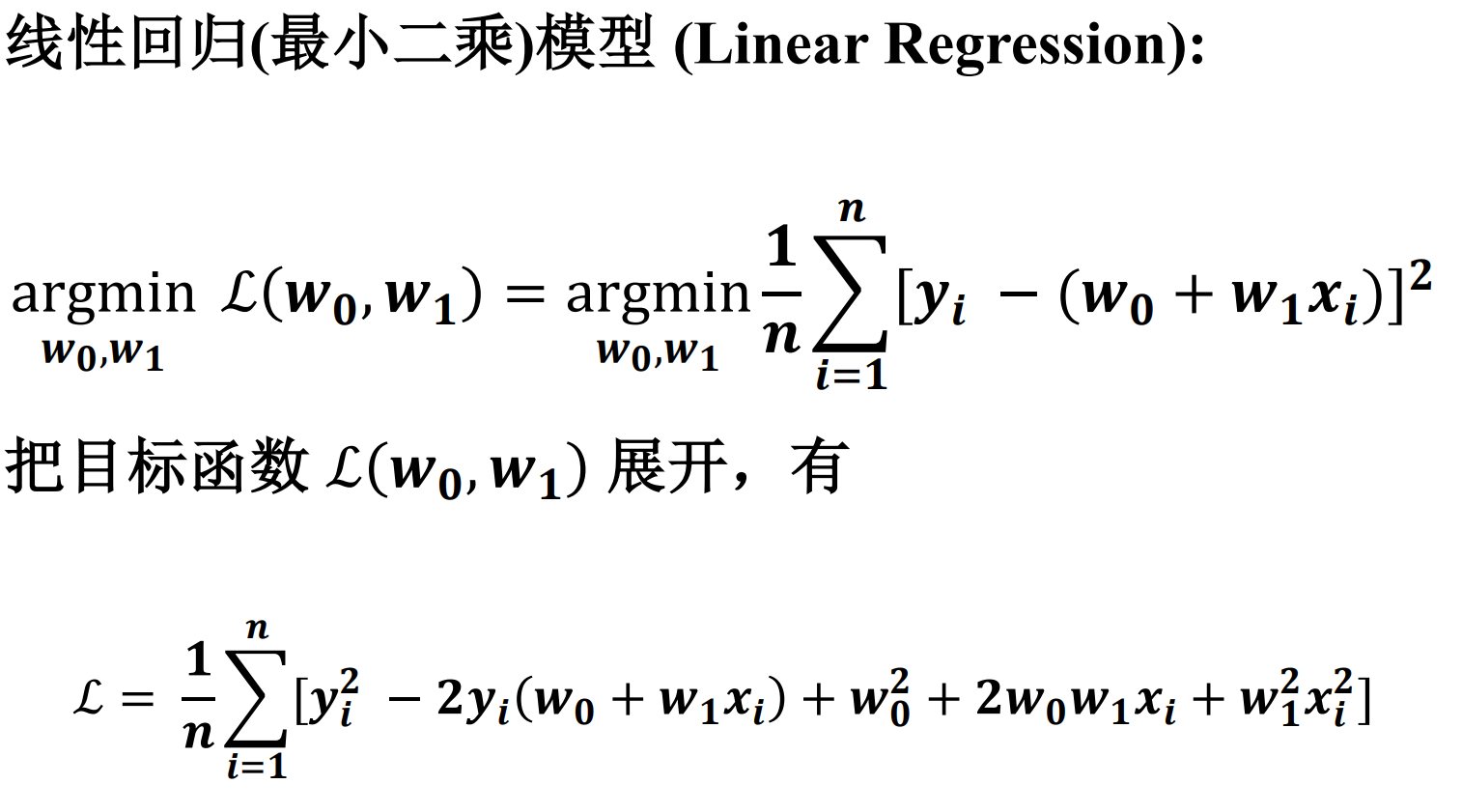
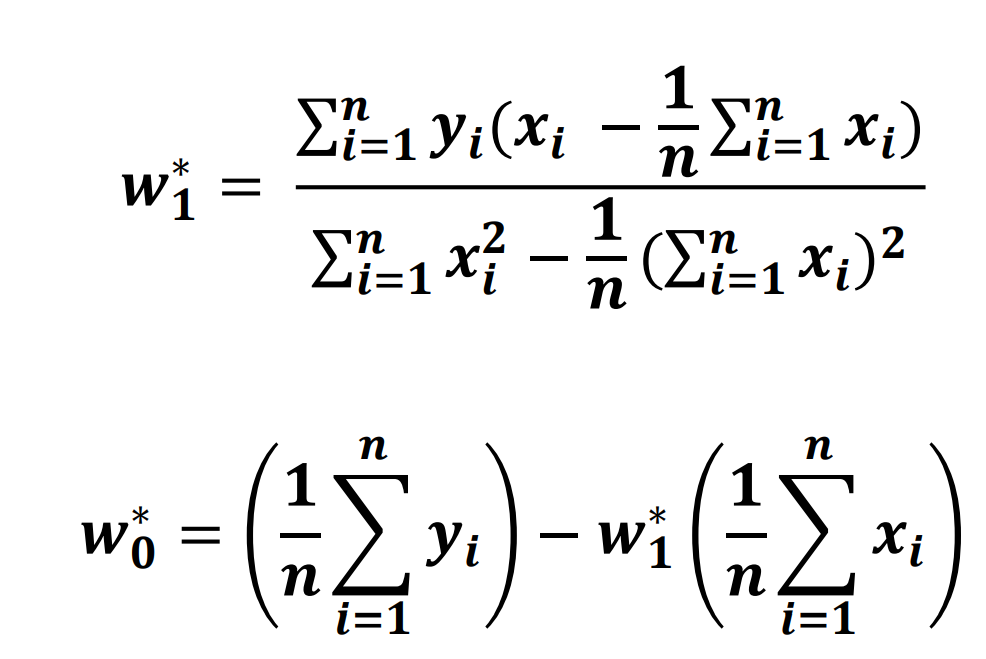
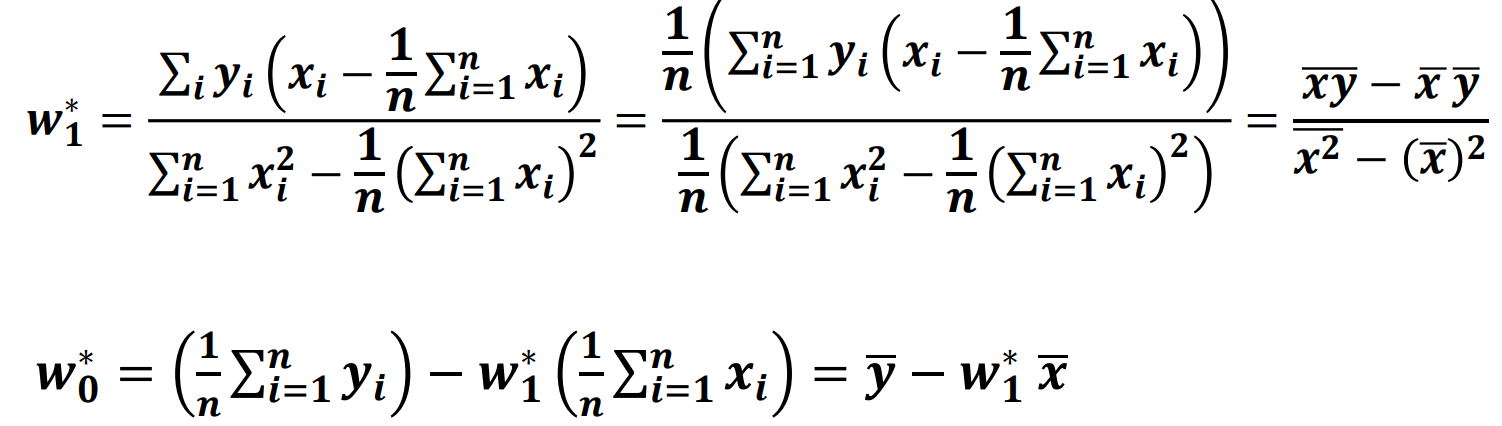
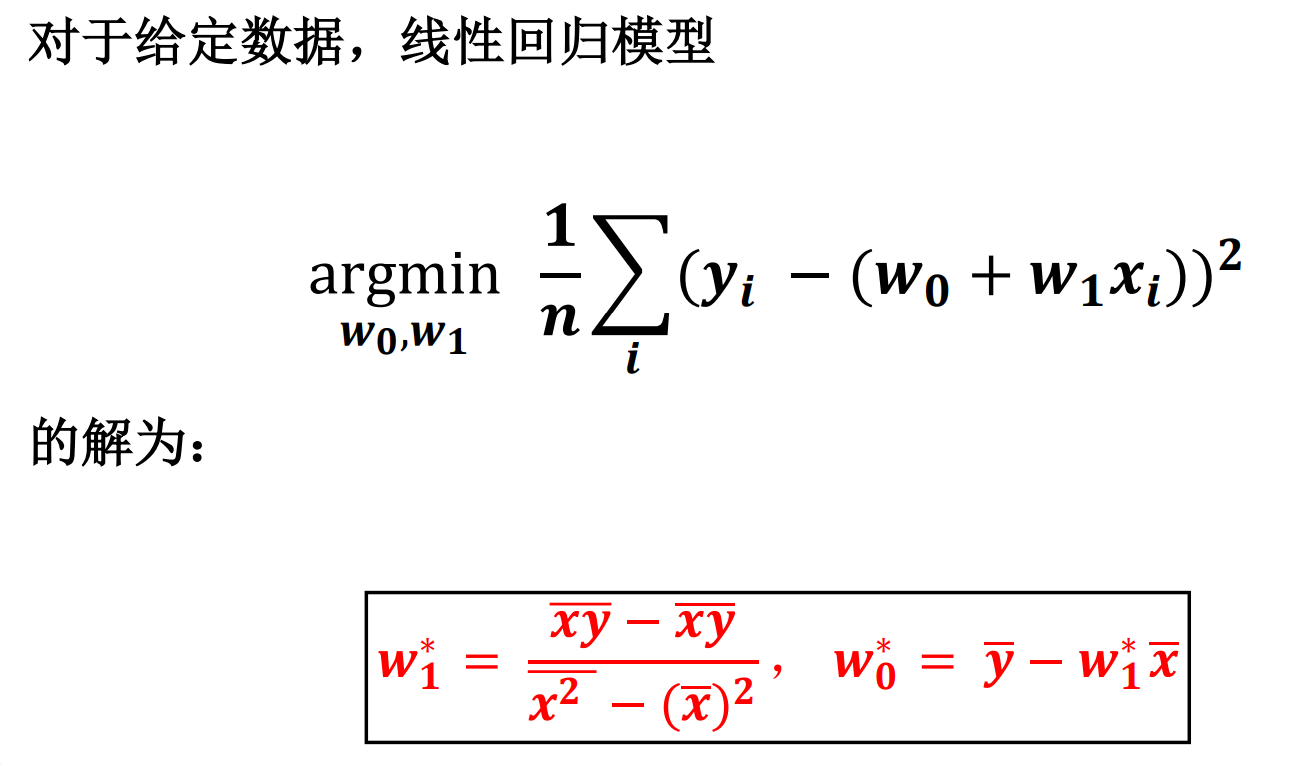
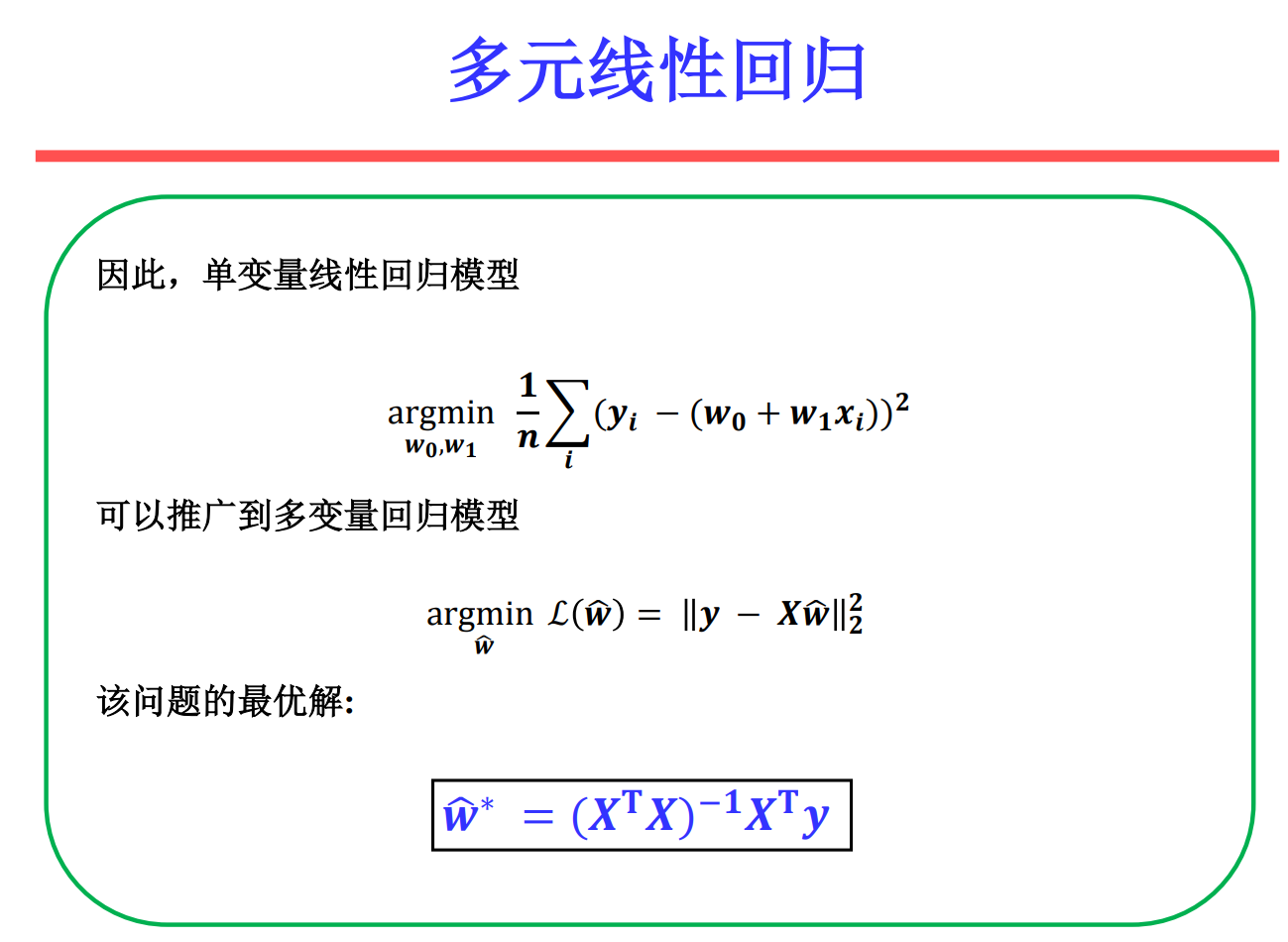
线性回归
监督学习( Supervised Learning )
回归与分类的区别
均是挖掘和学习输入变量和输出变量之间潜在关系模型,基于学习所得模型将输入变量映射到输出变量。
回归分析:学习得到一函数将输入变量映射到连续输出空间, 如价格和温度等,即值域是连续空间。
分类模型:学习得到一函数将输入变量映射到离散输出空间, 如人脸和汽车等,即值域是离散空间。
• 数据的相关性是普遍存在的。
• 回归是分析变量之间相关性的重要工具 – 碳排放量与气候变暖 – 商品广告投放量与商品销售量
• 回归分析:分析不同变量之间存在关系
• 回归模型:刻画不同变量之间关系的模型
• 如果这个模型是线性的——线性回归模型
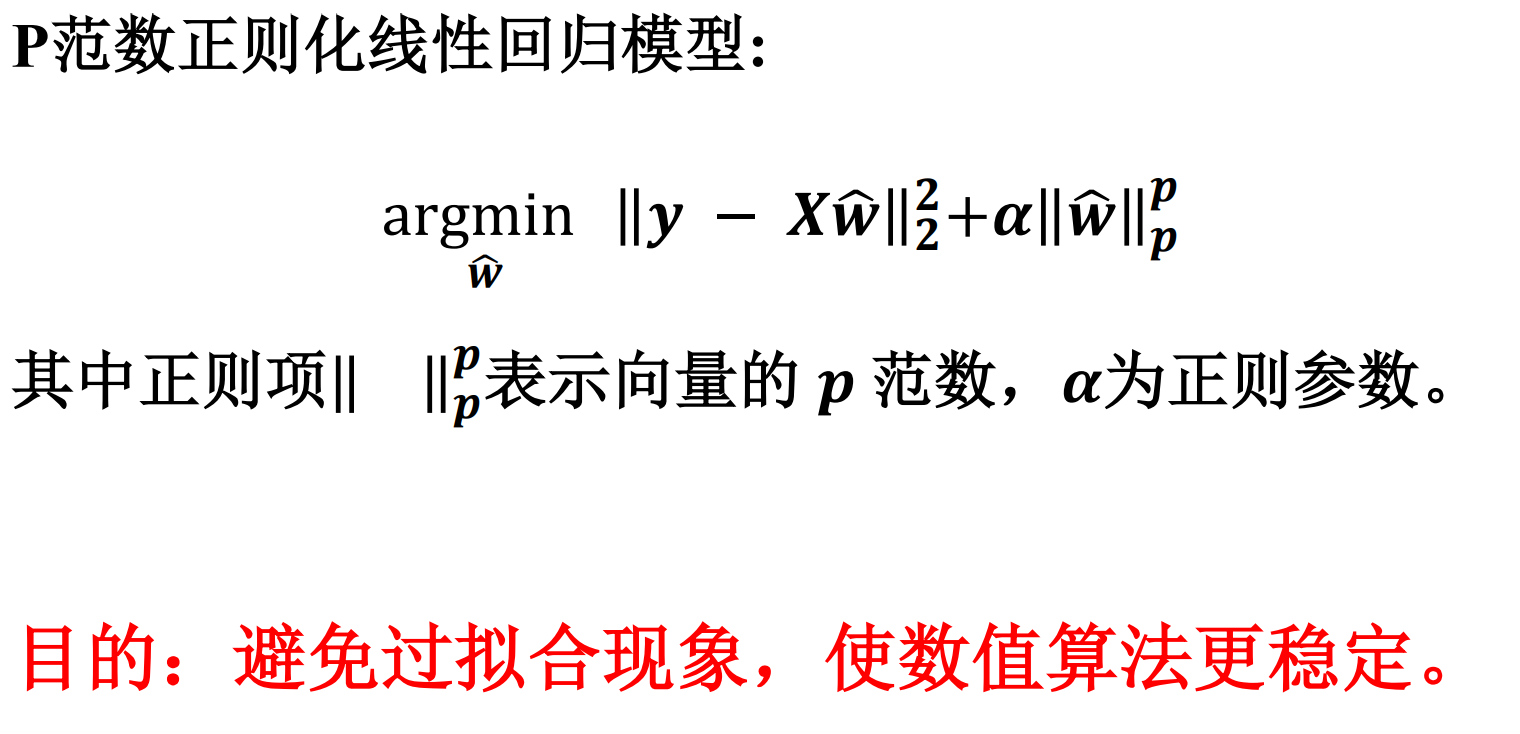
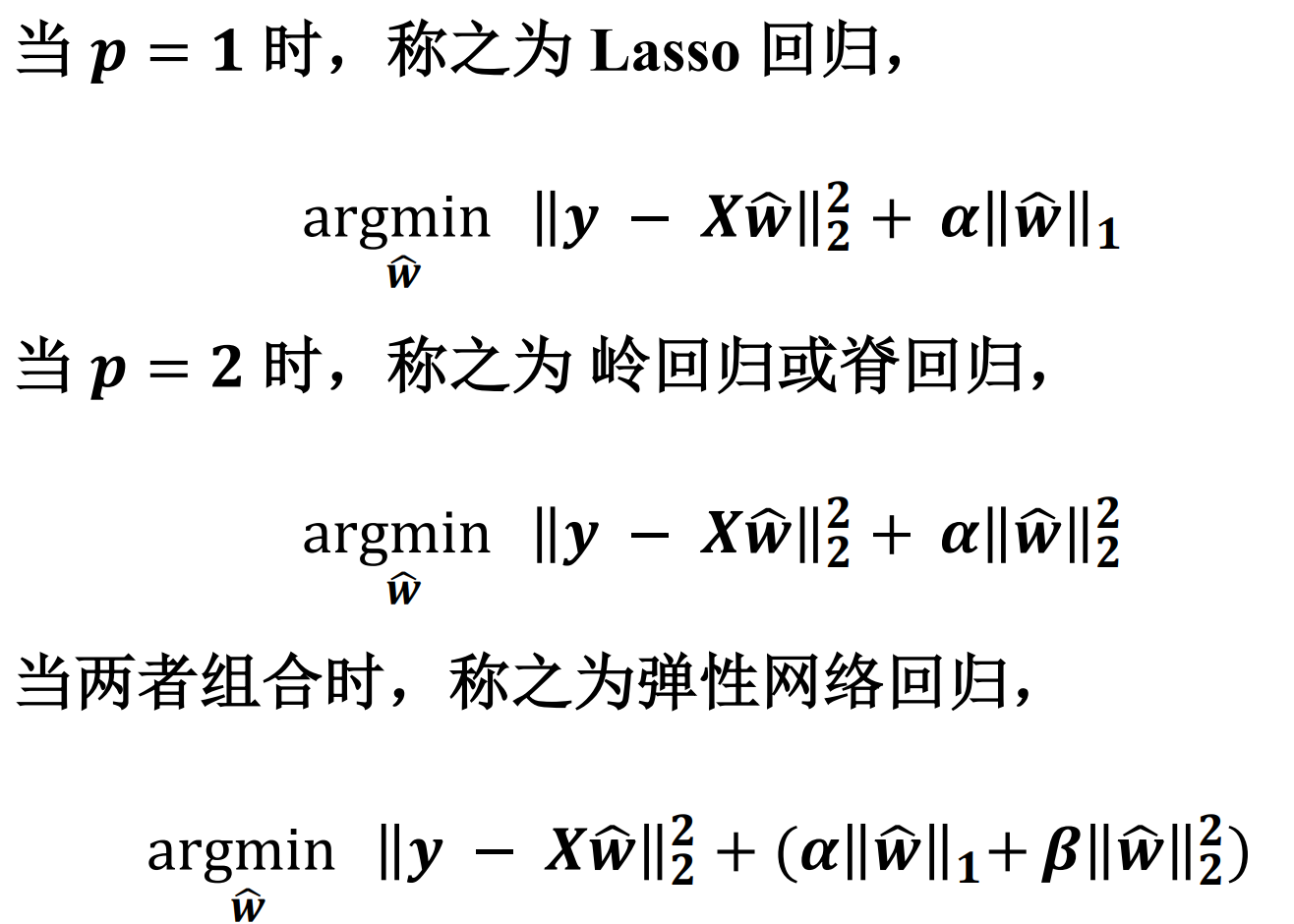
岭回归&Lasso回归
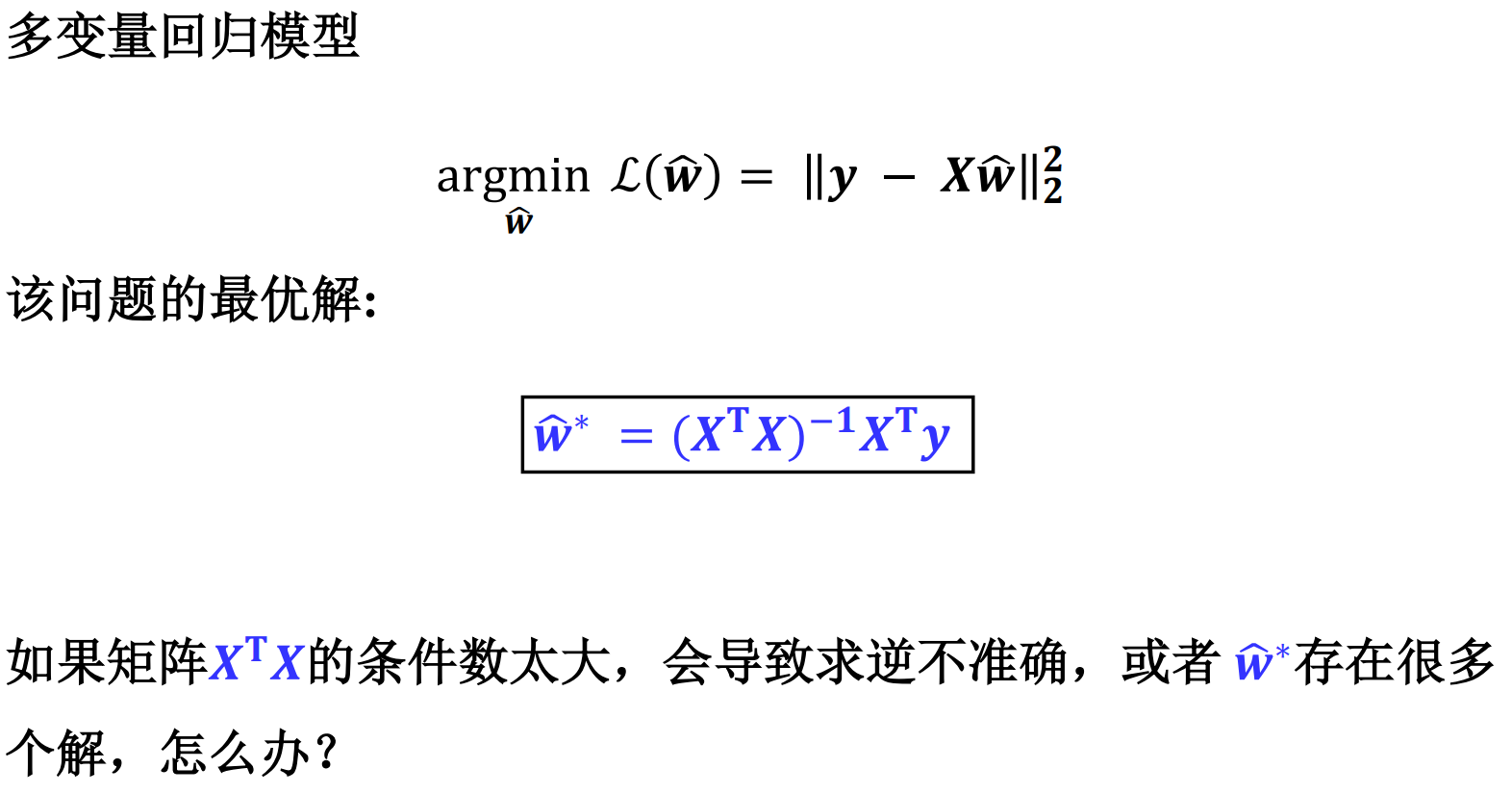
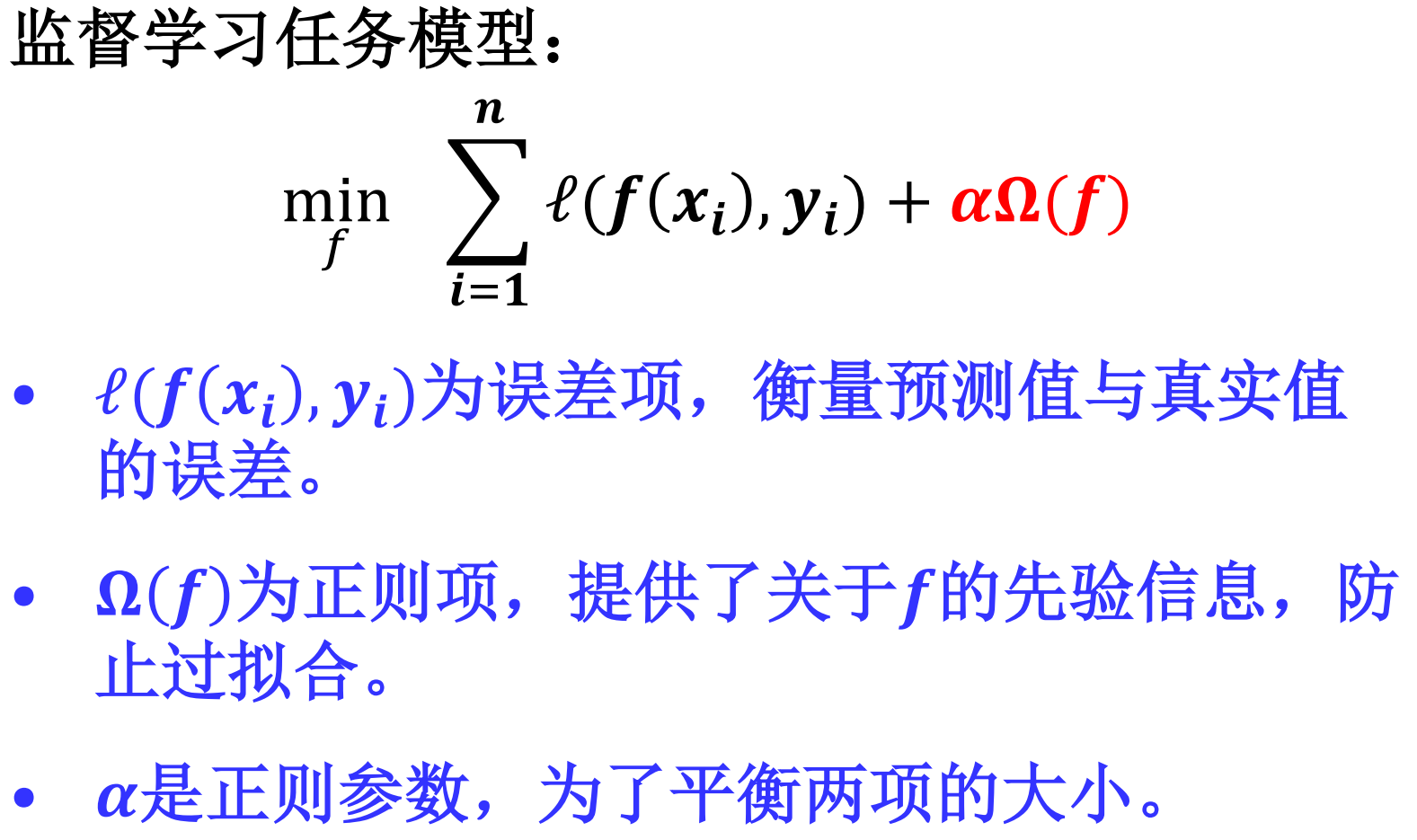
正则化模型
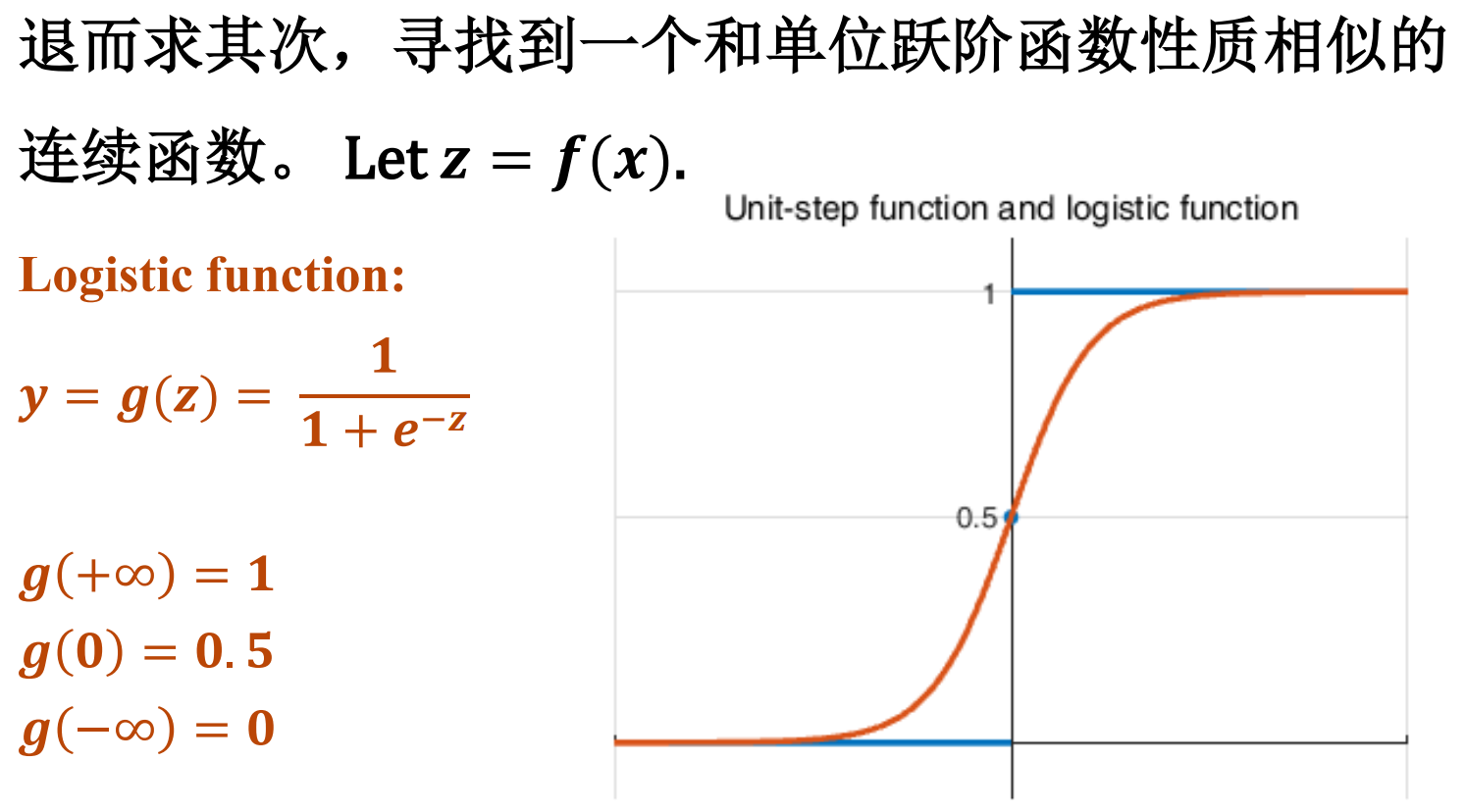
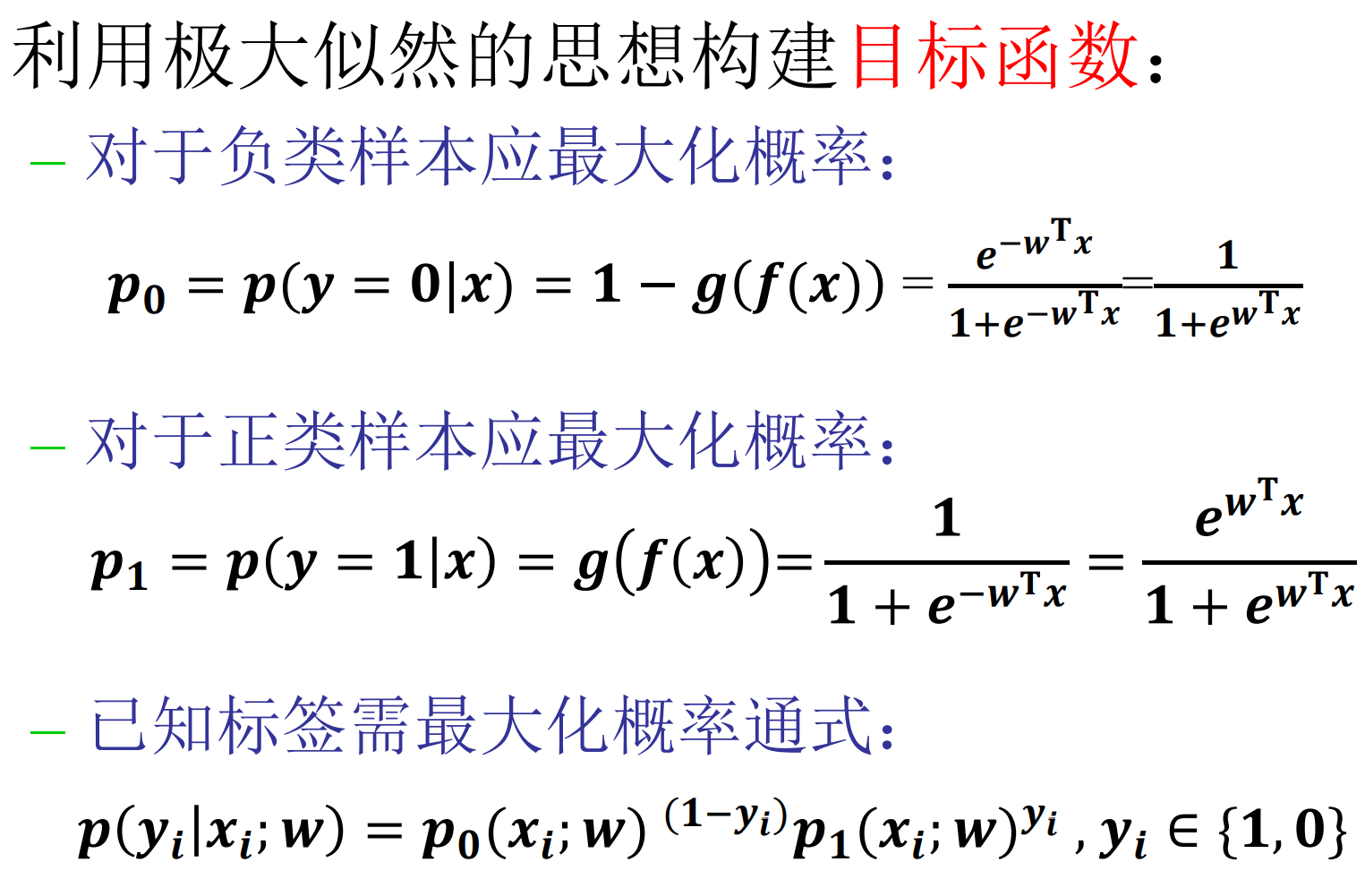
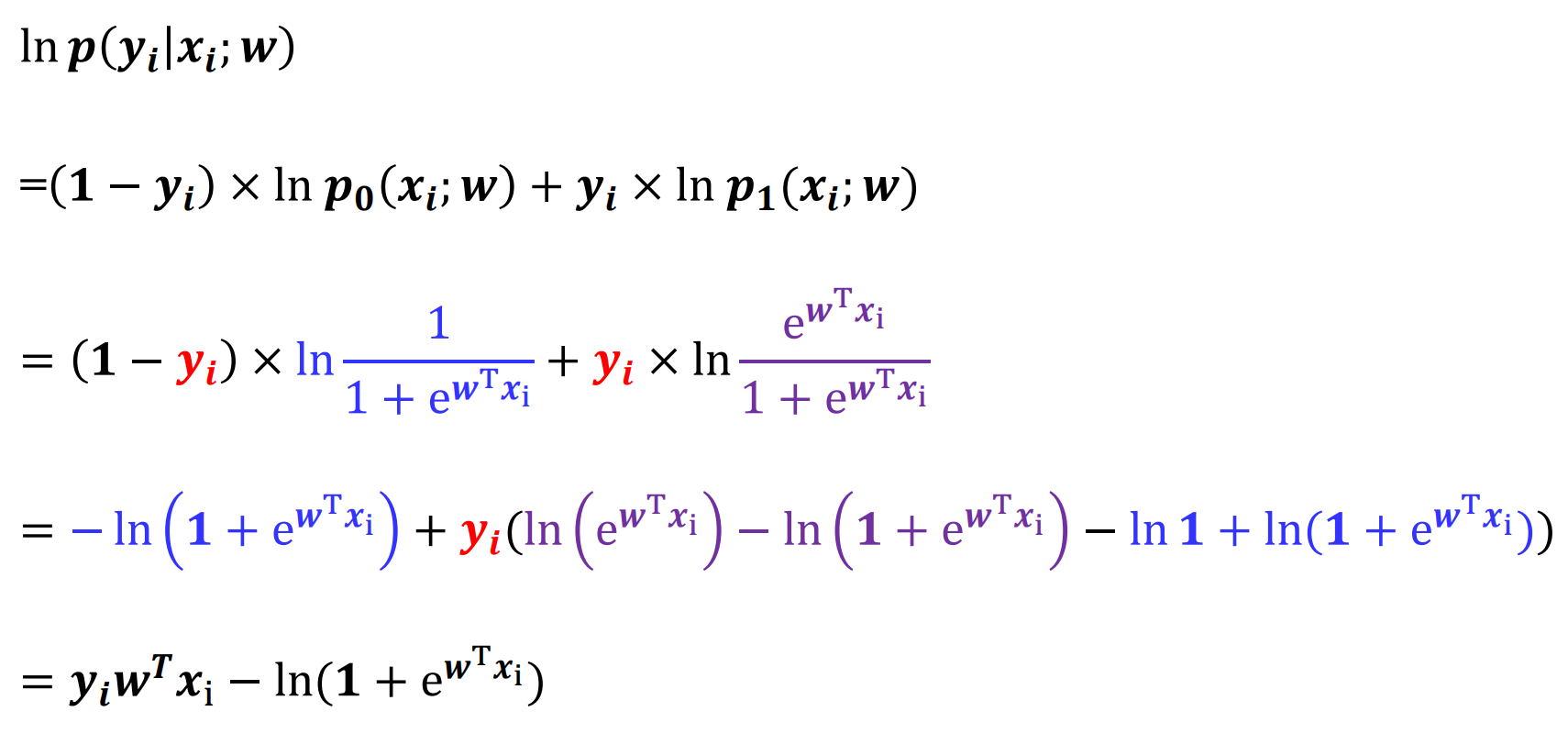
逻辑回归

决策树
决策树(decision tree):构建 一个基于属性的树形分类器。
- 每个非叶结点表示一个特征属性上的测试(分割)
- 每个分支代表这个特征属性在某 个值域上的输出
- 每个叶结点存放一个类别
使用决策树进行决策的过程就是从根结点开始, 测试待分类项中相应的特征属性,并按照其值选 择输出分支,直到到达叶子结点,将叶子结点存 放的类别作为决策结果。
决策树构建:分治法思想(递归) – 对于当前结点返回递归条件:
① 当前结点样本均属于同一类别,无需划分。
② 当前属性集为空。
③ 所有样本在当前属性集上取值相同,无法划分。
④ 当前结点包含的样本集合为空,不能划分。
决策树的核心
- 定义最佳划分属性:
- 经过属性划分后,不同类样本被更好的分离。
- 理想情况:划分后样本被完美分类。即每个分支的样本都属于同一类。
- 实际情况:不可能完美划分!尽量使得每个分支某 一类样本比例尽量高!即尽量提高划分后子集的纯 度(purity)。
- 最佳划分属性目标:
- 提升划分后子集的纯度
- 降低划分后子集的不纯度
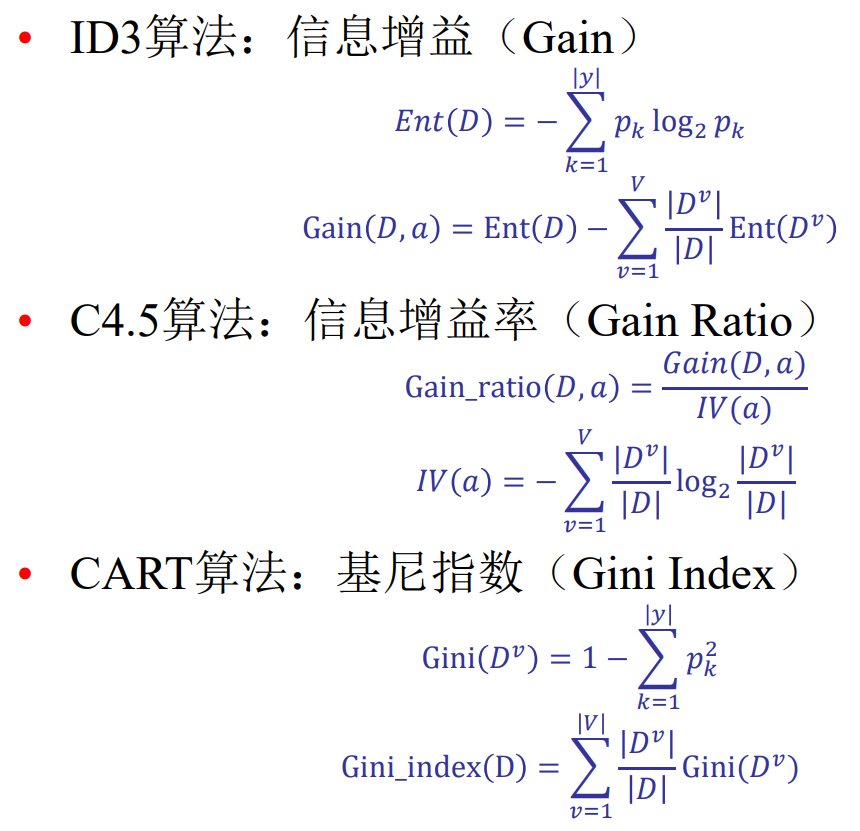
ID3
纯度↑=确定性↑=信息量↓
度量信息量——信息熵:
信息熵用来度量信息量,信息熵值越小,说明样本集的纯度越高。
利用划分后的信息增益来判断属性划分的优 劣性。
定义关于属性划分后信息熵度量:
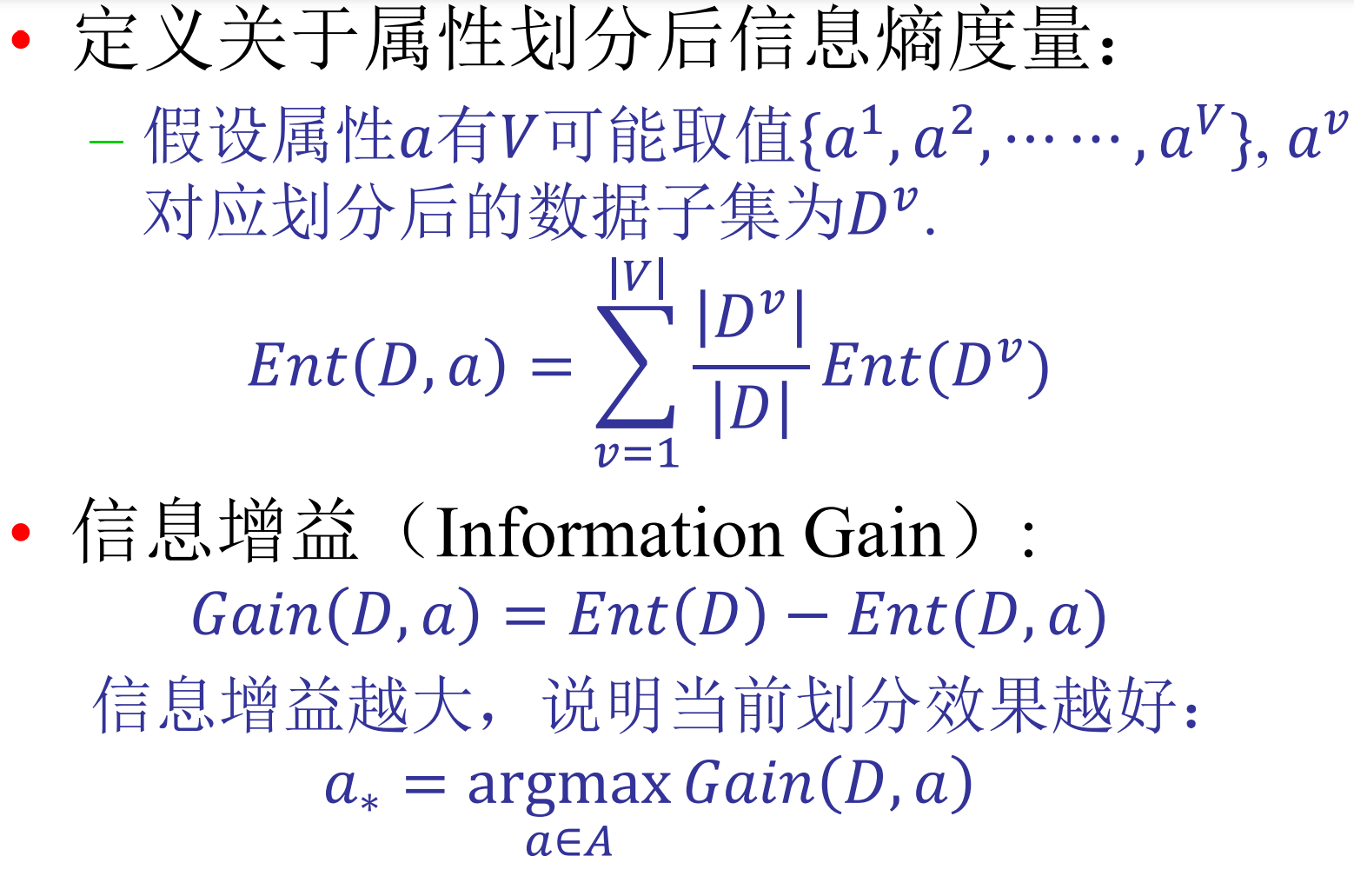
信息增量准则对可取值数目较多的属性有所偏好。
C4.5
增益率(Gain Ratio)
IV(𝑎)称为属性𝑎的“固有值”(Intrinsic Value)
C4.5算法并不是直接选择增益率最大的候选划分属性,而是使用一个启发式:
先从候选划分属性中找出信息增益高于平均水平的属性,再从中选择增益率高的属性。
CART
判断准则——基尼指数(Gini Index):
Gini(D)越小,则数据集D的纯度越高
总结
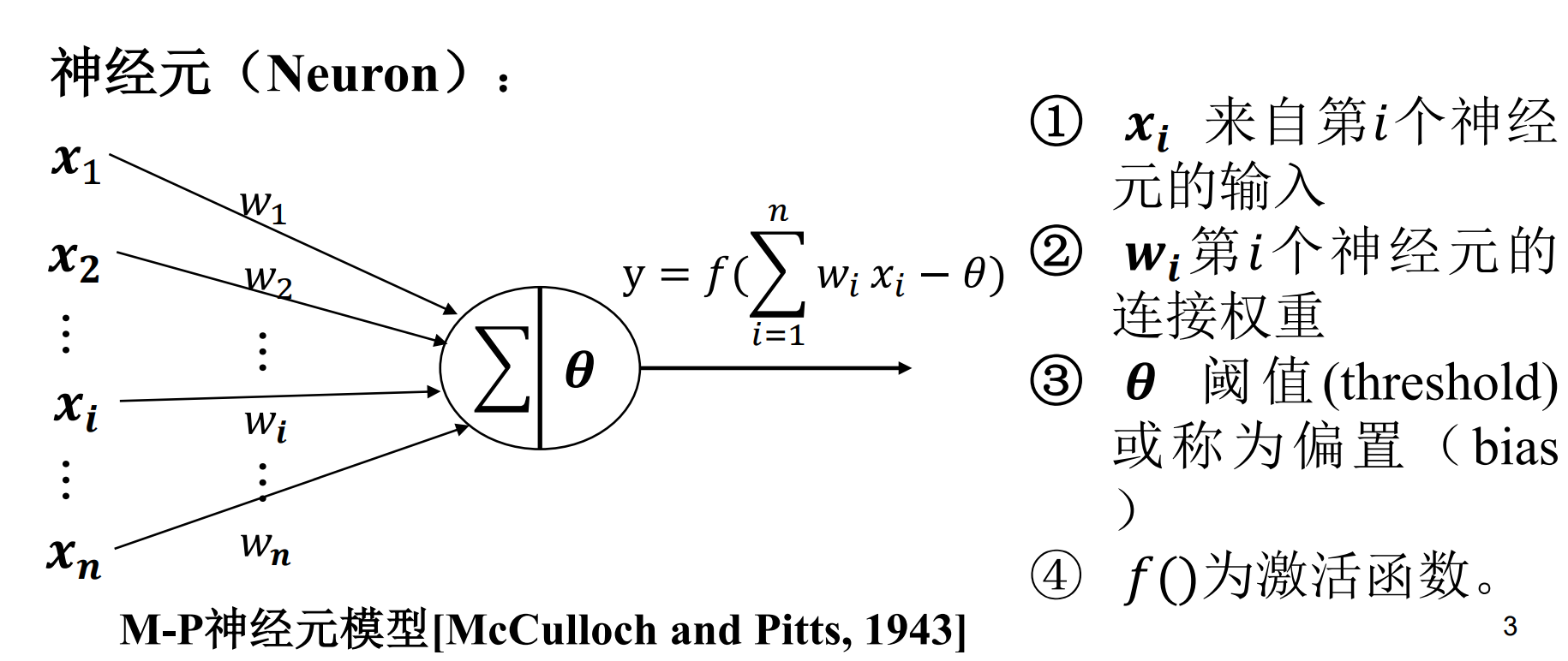
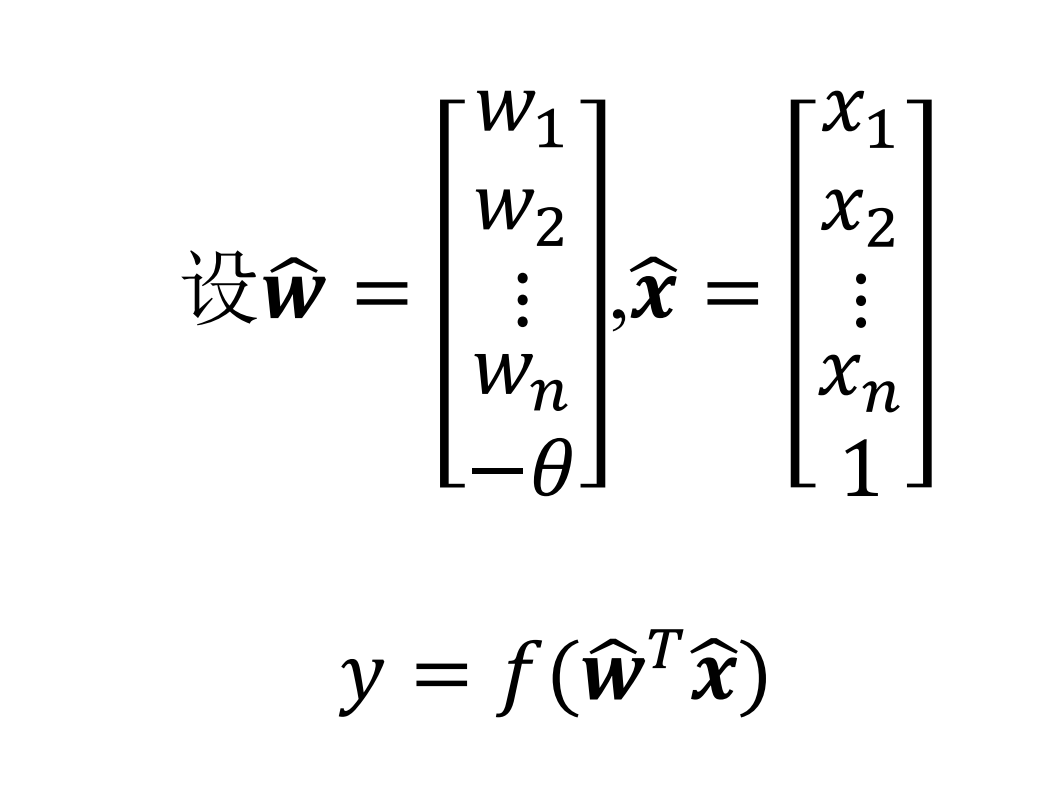
神经网络
神经网络是由具有适应性的简单单元组成的广泛并行互 连的网络,它的组织能够模拟生物神经系统对真实世界物体所 做的交互反应。
sigmoid function不是某一个函数,而是指某一类形如"S"的函数,都可以成为sigmoid的函数.
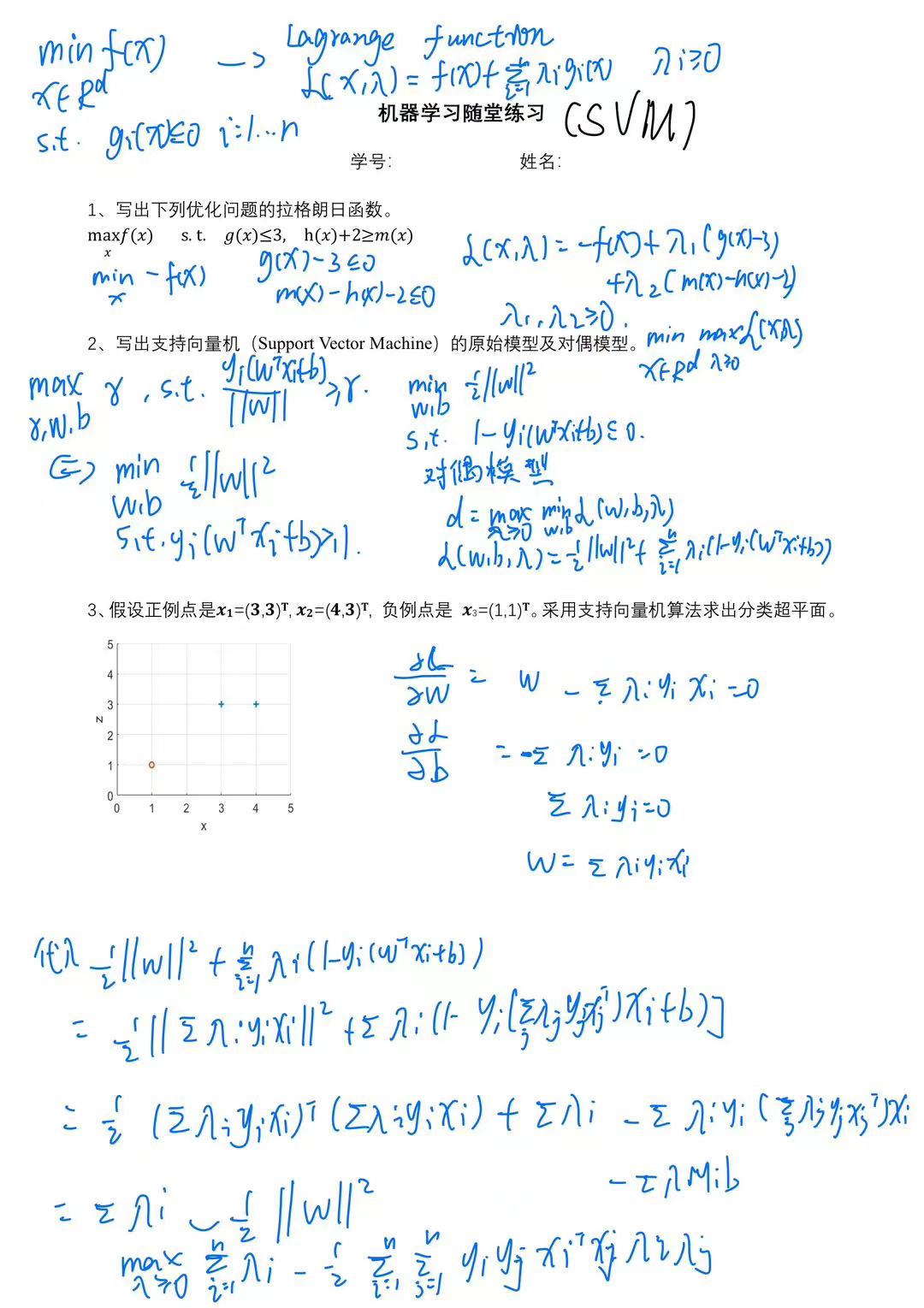
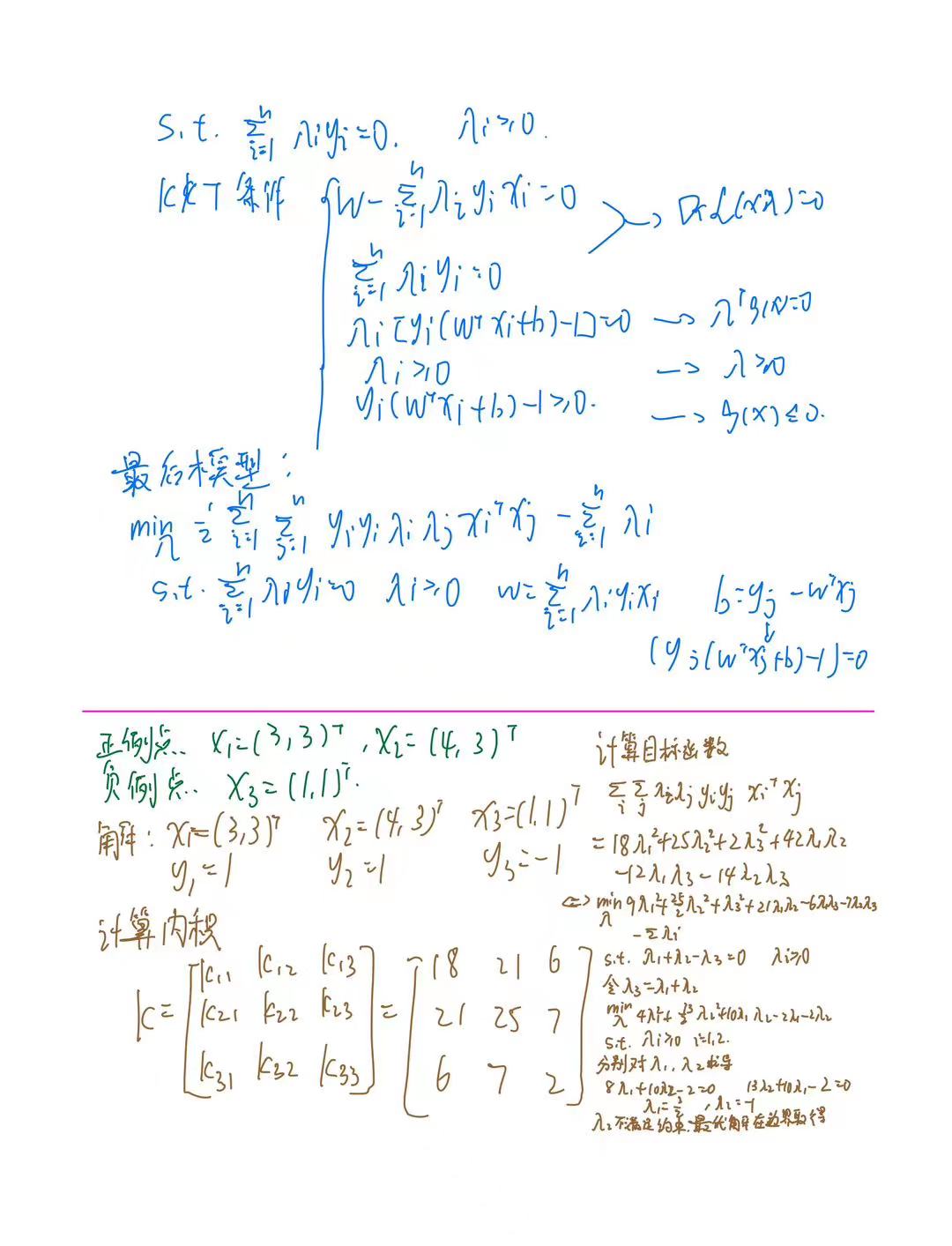
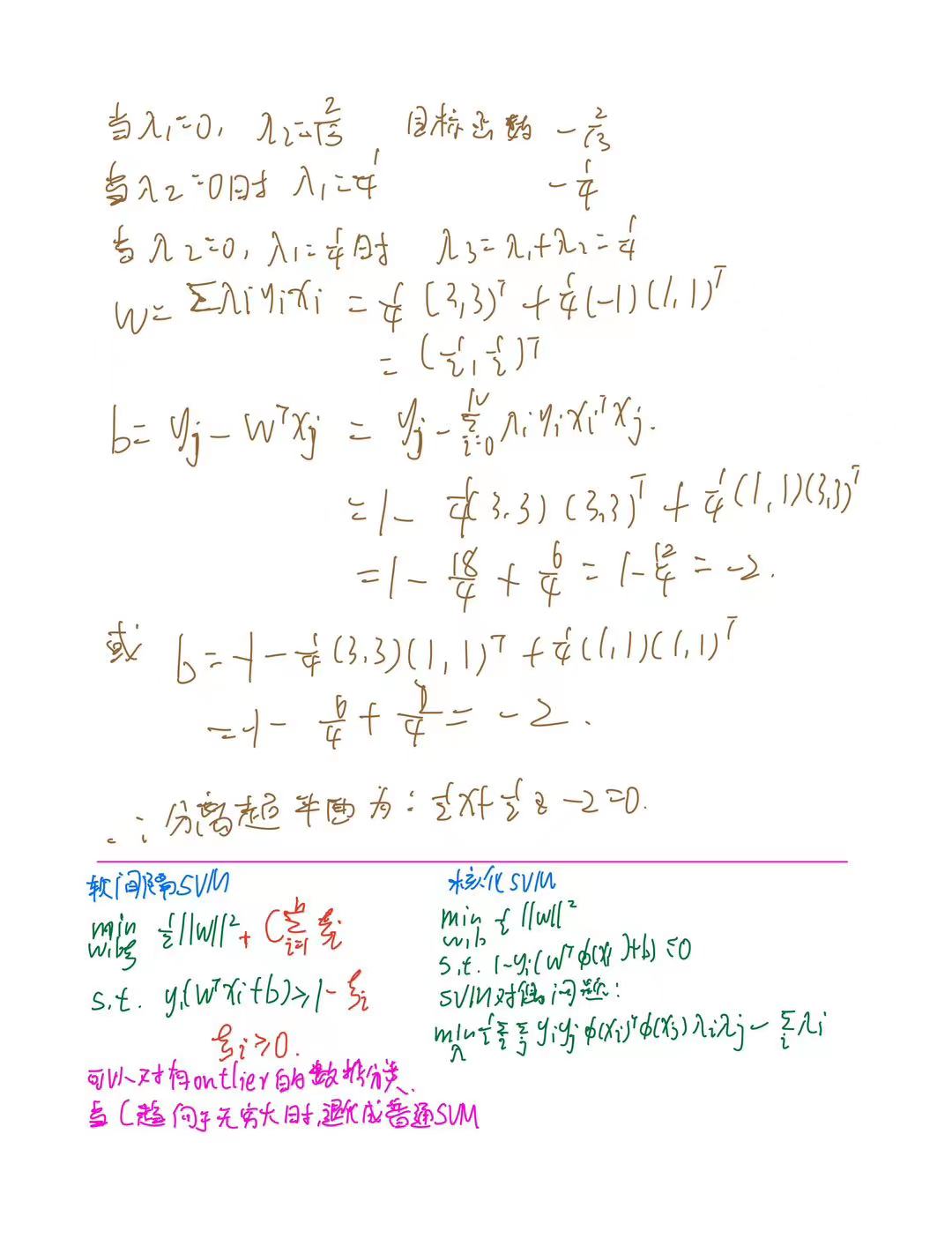
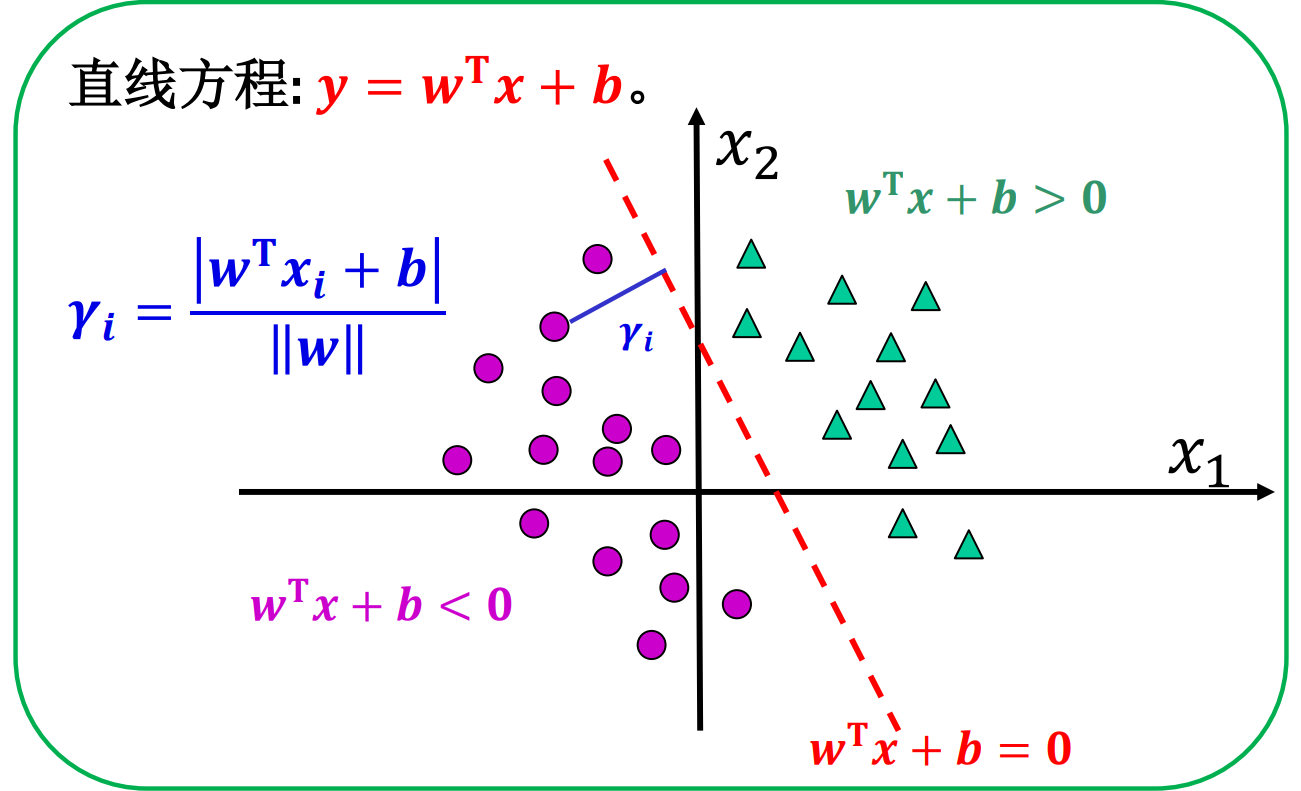
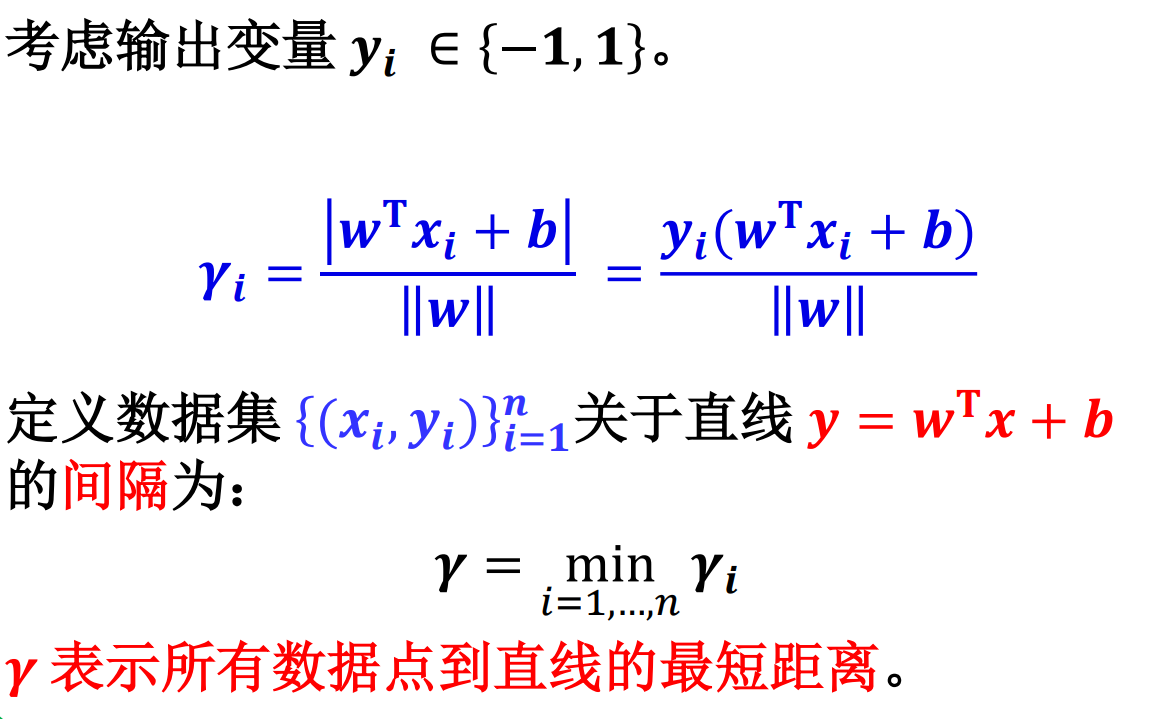
支持向量机(SVM)
如果一个数据集是线性可分的,那么一定存在无数 多个超平面将两个类别完全分开。
主观上说,离分类边界远的样本的置信度高, 而离分类边界近的样本的置信度低。
逻辑回归算法是基于全部样本的二分类器:考虑 全部样本的平均似然性。
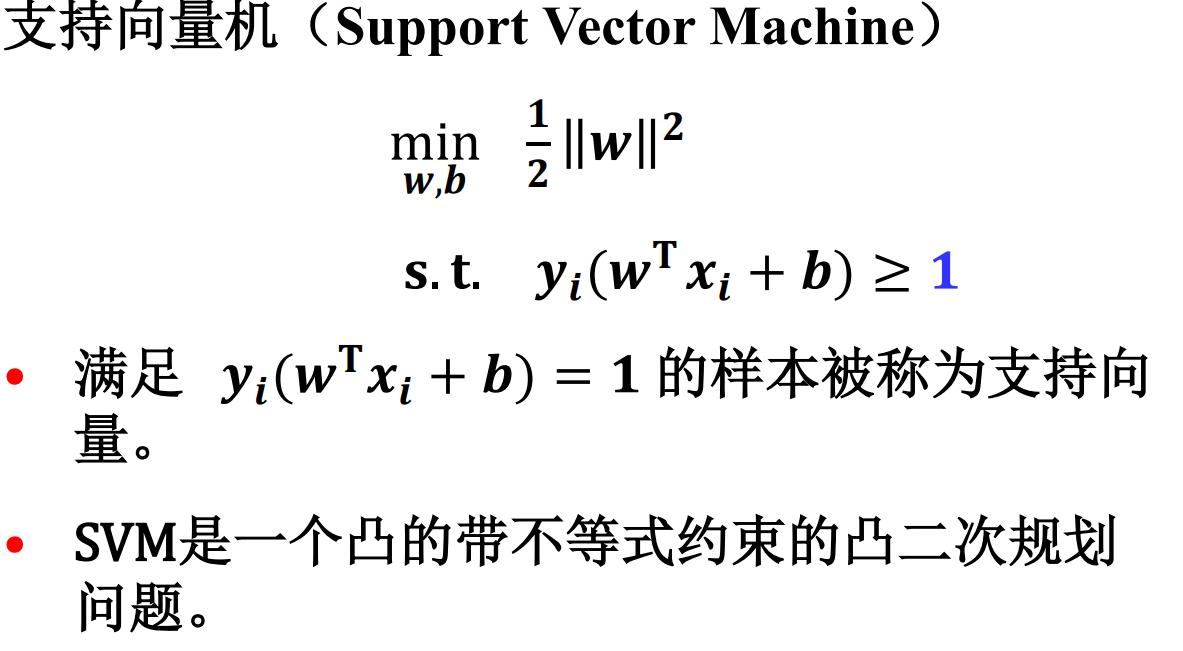
支持向量机算法是基于部分样本的二分类器:考 虑部分靠近边界的支持向量。
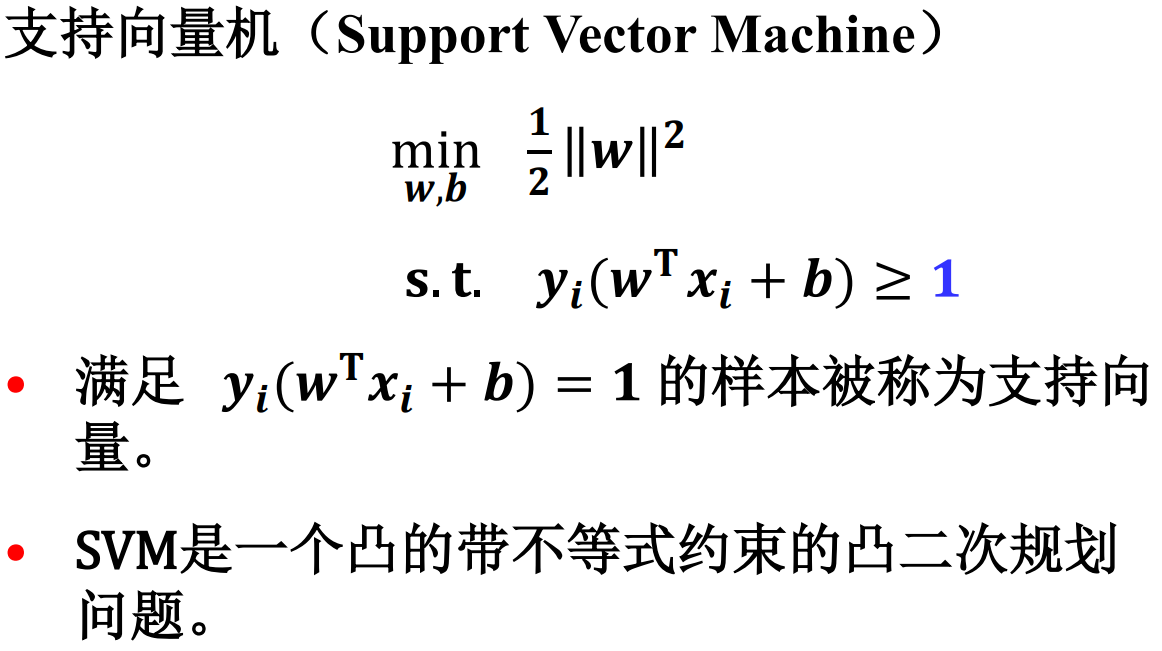
- 支持向量机的基本思想是寻找两类样本之间最中间的超平面。
- 支持向量机的目的是使划分平面对于样本的扰动容忍性好。
- 逻辑回归算法是基于全部样本的二分类器:考虑 全部样本的平均似然性。
- 支持向量机算法是基于部分样本的二分类器:考 虑部分靠近边界的支持向量。
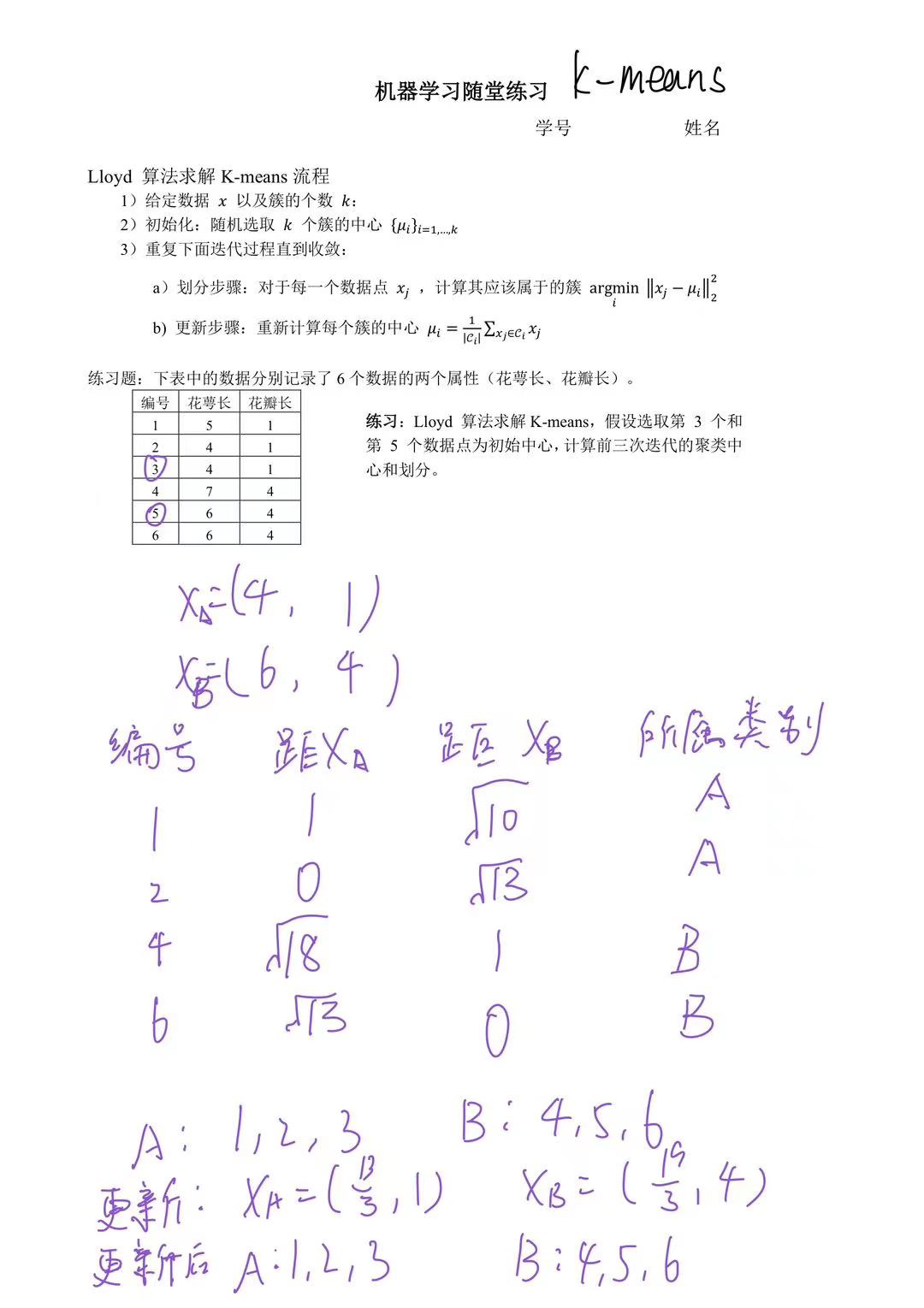
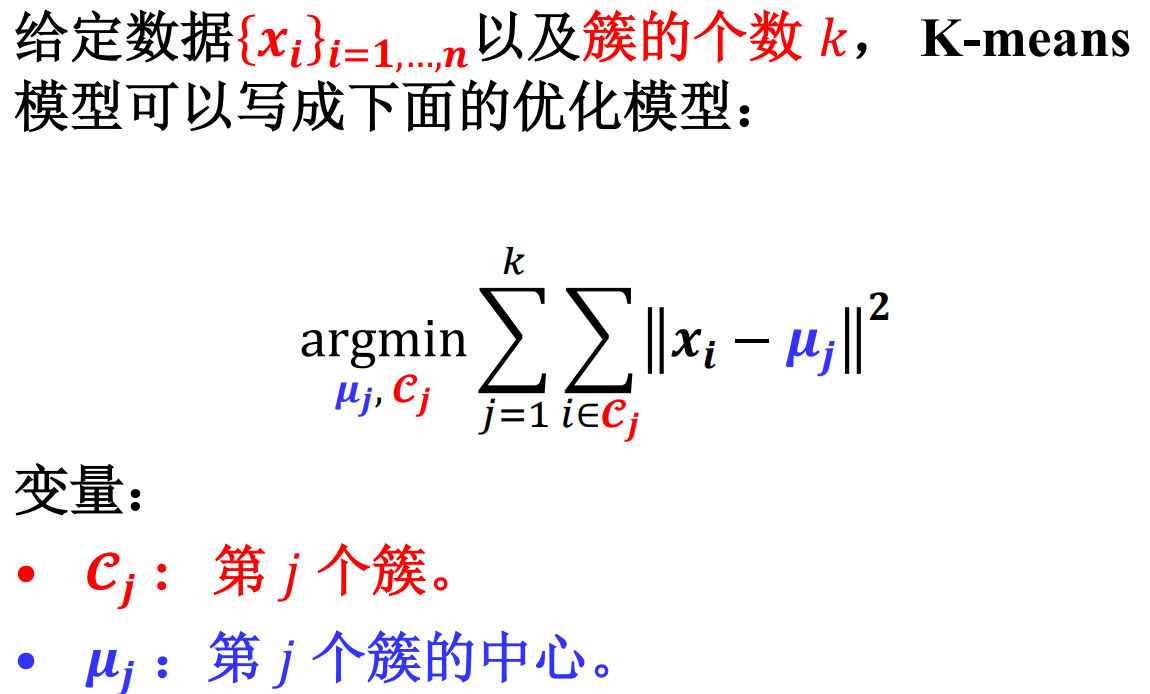
聚类
聚类:根据某种相似性,把一组数据划分成若干个簇的过程。
难点:
- 相似性很难精准定义
- 各种距离,度量学习。
- 可能存在的划分太多
- 避免穷举,优化算法
- 多少个簇
- 预先给定,算法自适应。
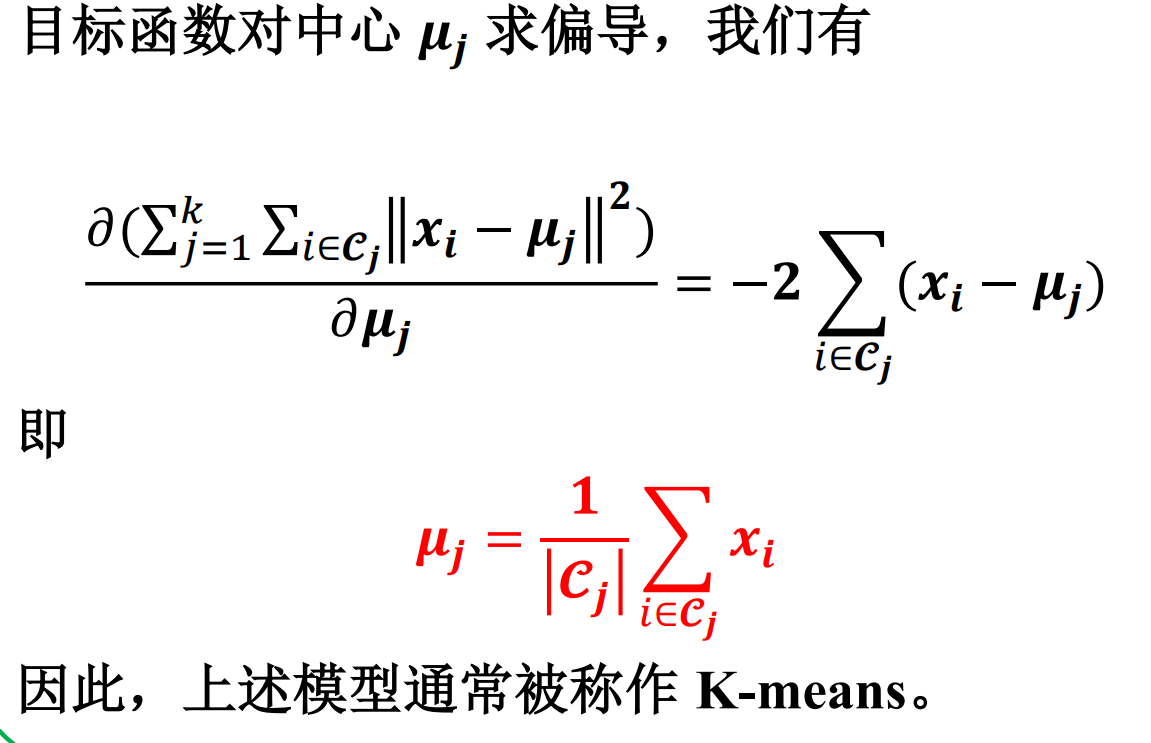
聚类问题可以通过为每个簇 寻找合适的中心来实现。
假设每个簇的中心已经找到, 可以把所有数据点分配到距 离它最近的中心所在的簇。
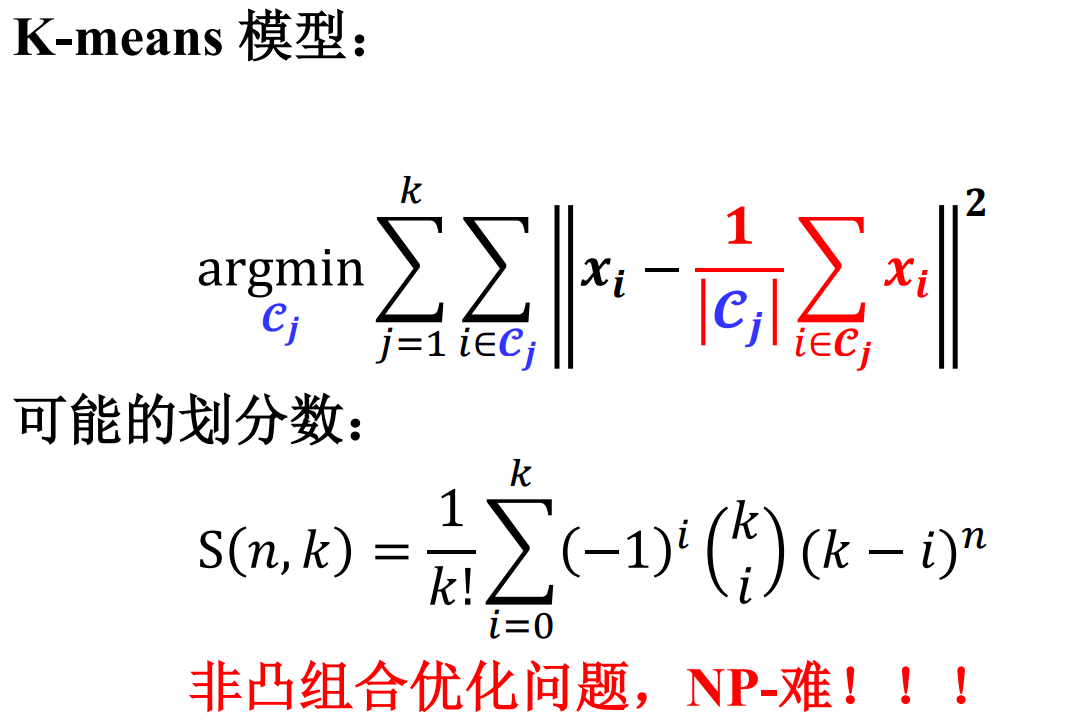
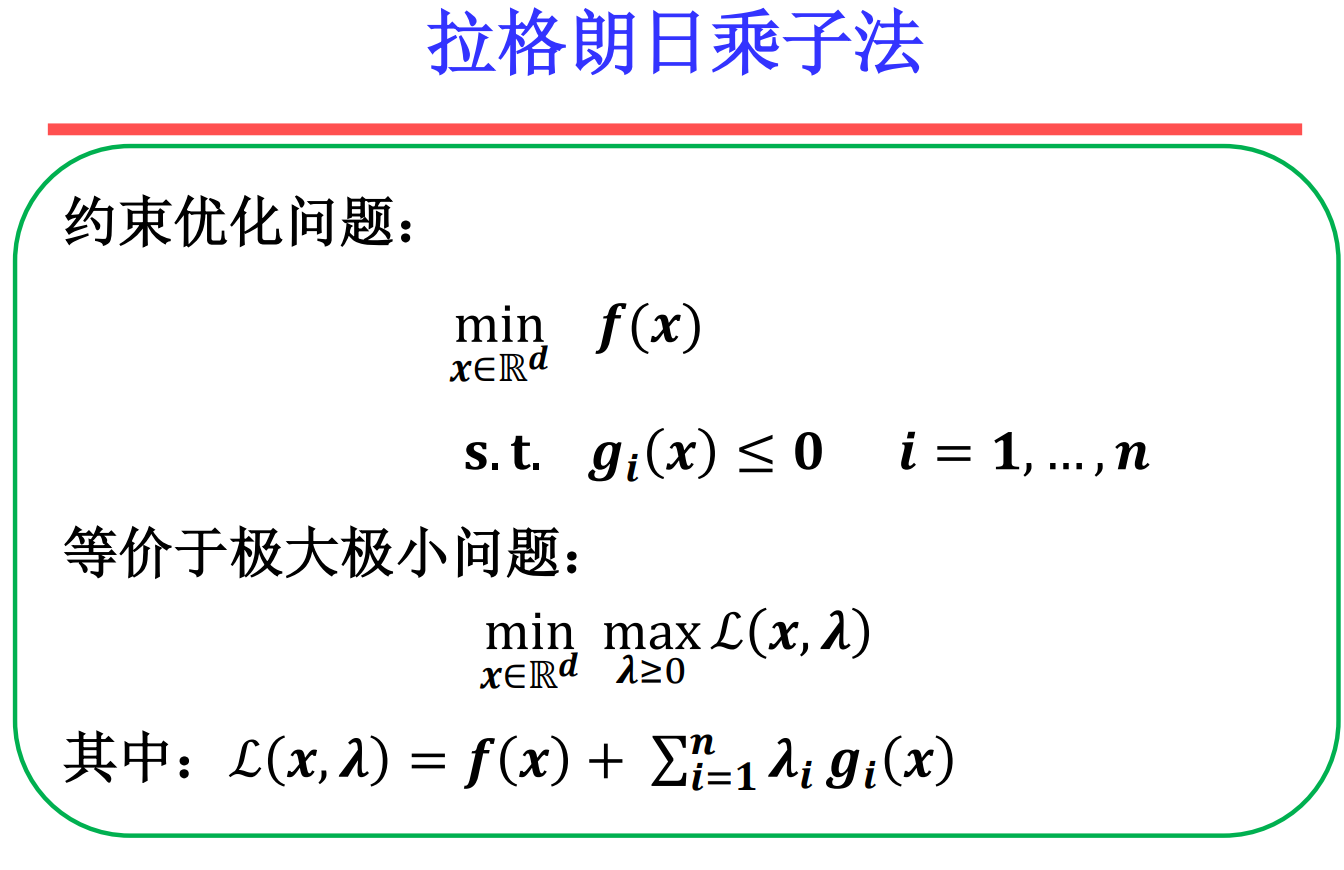
求解非凸组合优化问题的两种常见方法:
• 启发式方法 (Heuristic method) :一个基于直观或经验构造的算法,在可接受的时间内下给出待解决组合优化问题每一个实例的一个 可行解,该可行解与最优解的偏离程度一般 不能被预计。
• 松弛方法 (Relaxation method) :对组合优化问题进行适当的松弛,将其转化为多项式时间内可解的优化问题,松弛后问题的解不是原组合优化问题的解,需要适当的后处理。
优势:
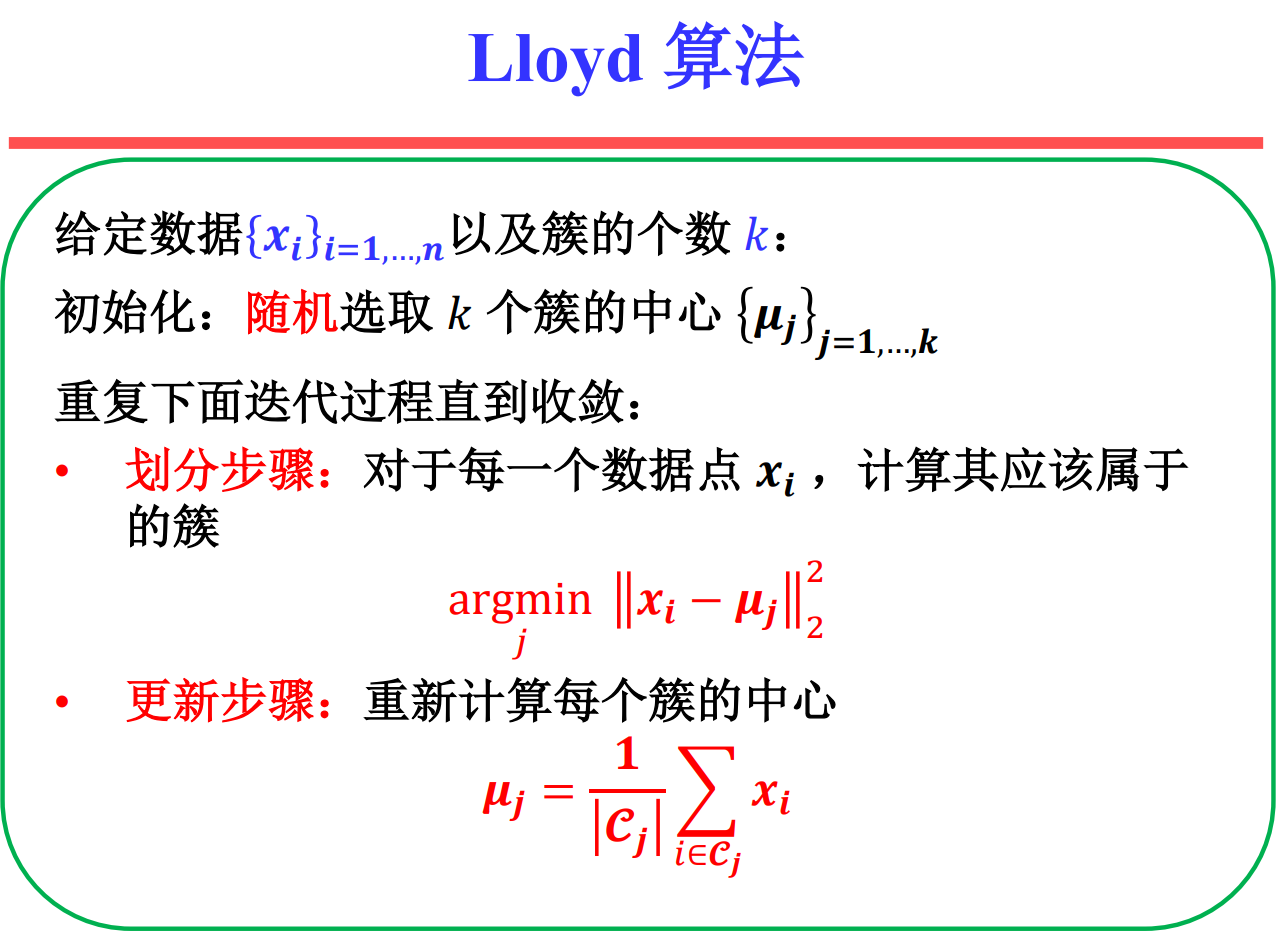
• Lloyd 算法属于EM算法(期望最大化),可以保证收敛到K-means问题的局部最优解。
• Lloyd 算法的速度快,计算复杂度为O(nk)。
• Lloyd 算法思想简单,容易实现,可拓展性强。
劣势:
• 簇的个数 k 需要预先给定。
• 聚类结果依赖于初值的选取。
K-means++是一种初始化方法,目的是改进K-means算 法对初值的影响。
Step 1:随机选取一个簇的中心 𝝁𝟏
Step 2: 选择离已有中心最远的数据点作为新的中心
Step 3: 重复Step 2直到选出 𝑘个中心
Step 4: 运行K-means算法
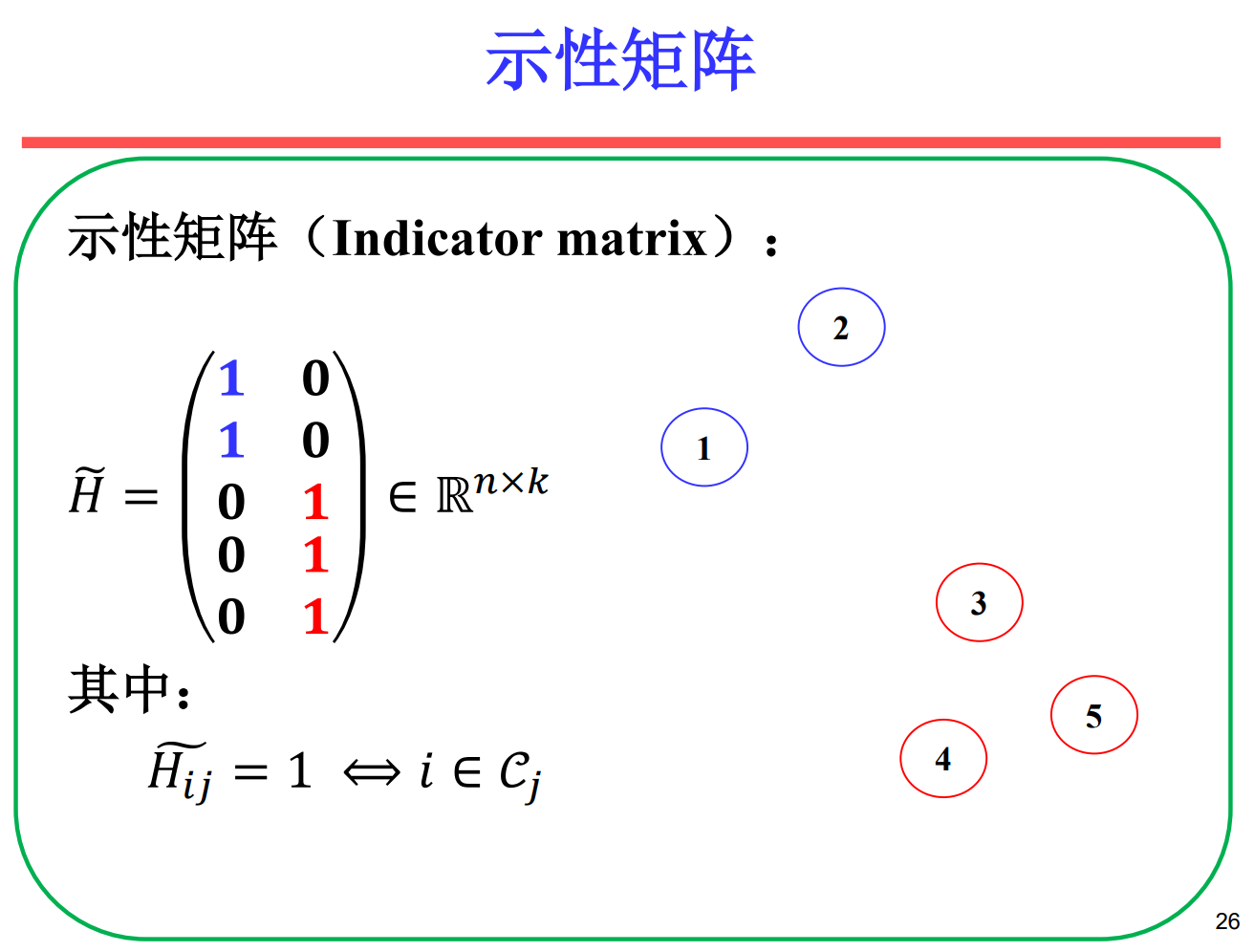
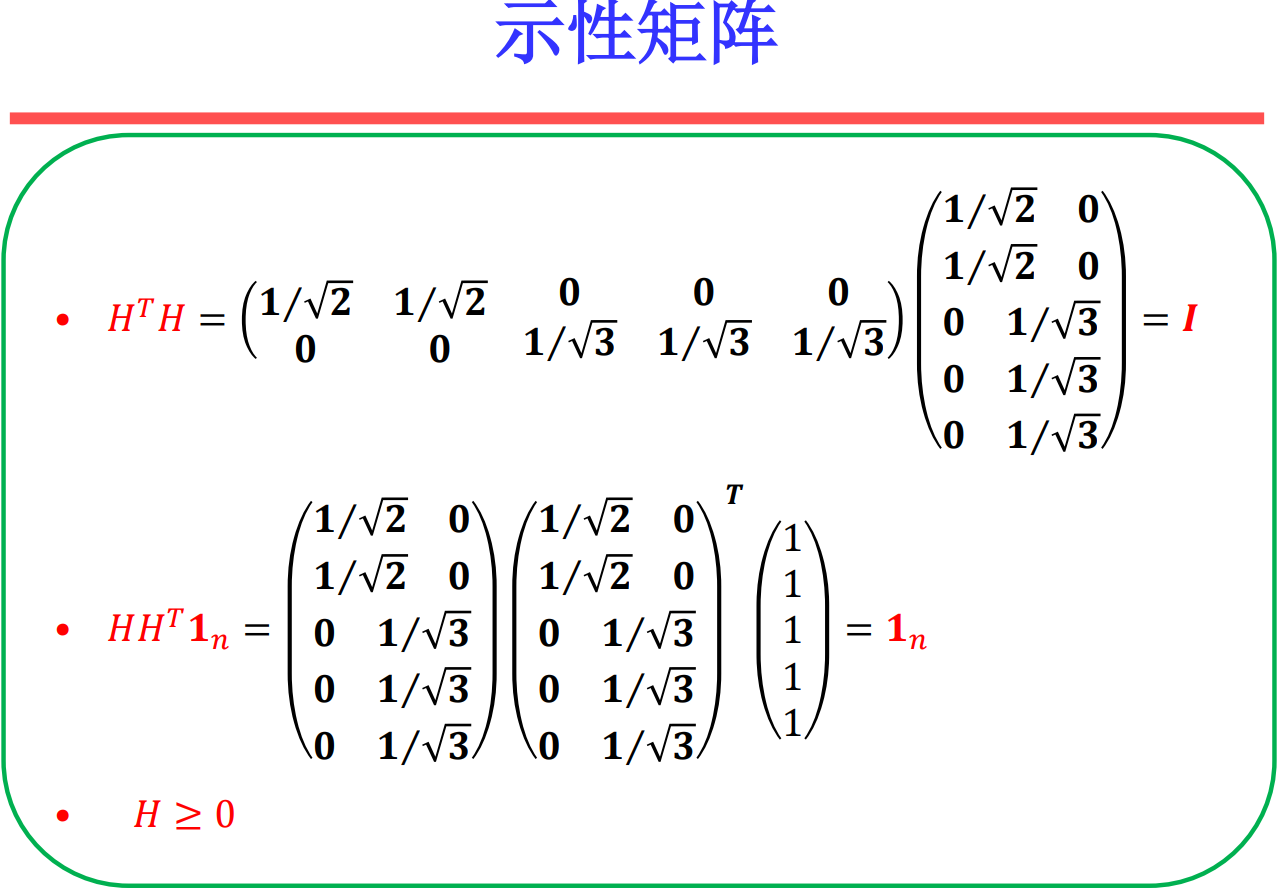
所有标准化示性矩阵都满足

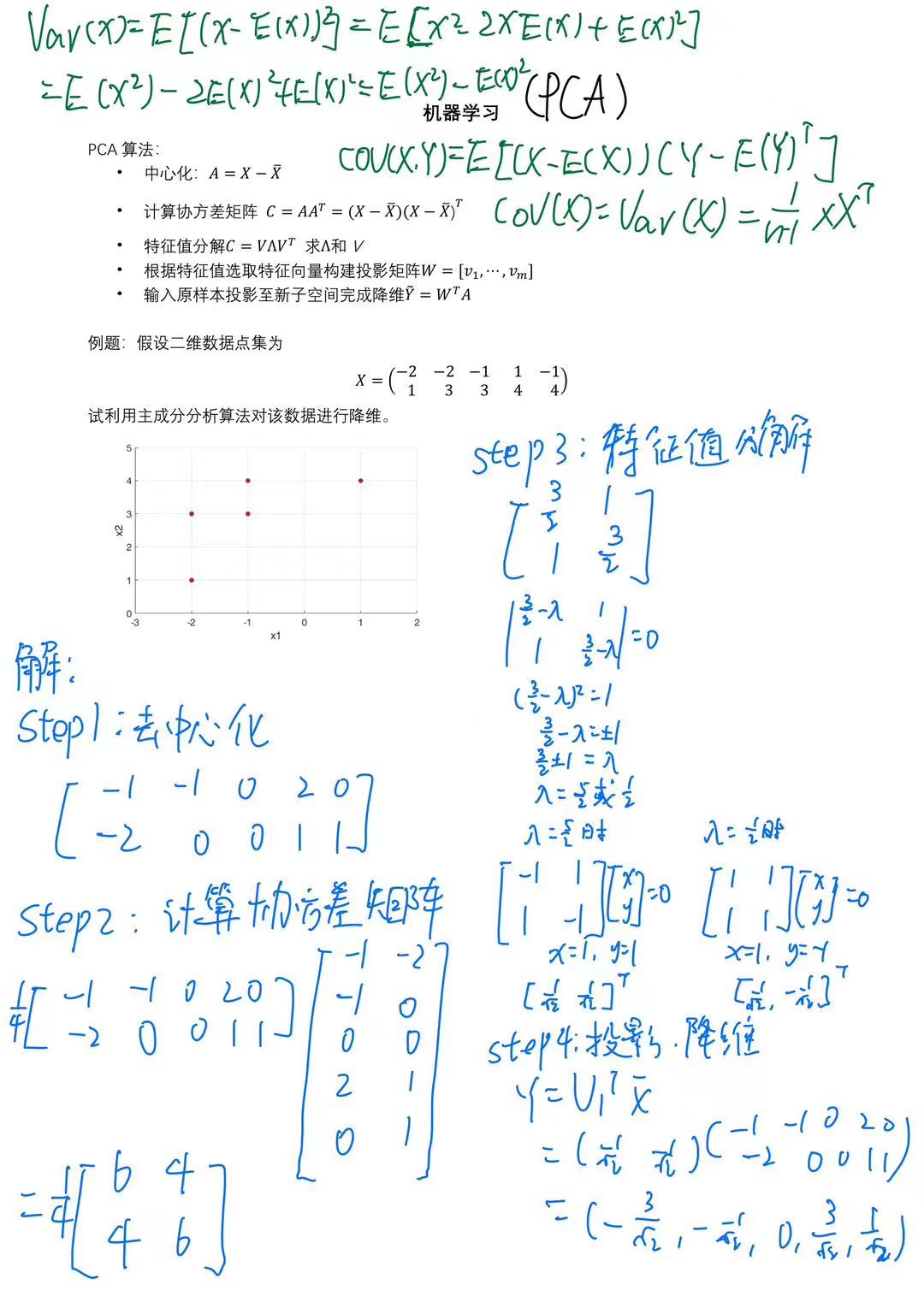
主成分分析
最大方差理论(信号处理领域,Signal Processing)
在信号处理中认为信号具有较大的方差,噪声有较小的方 差。
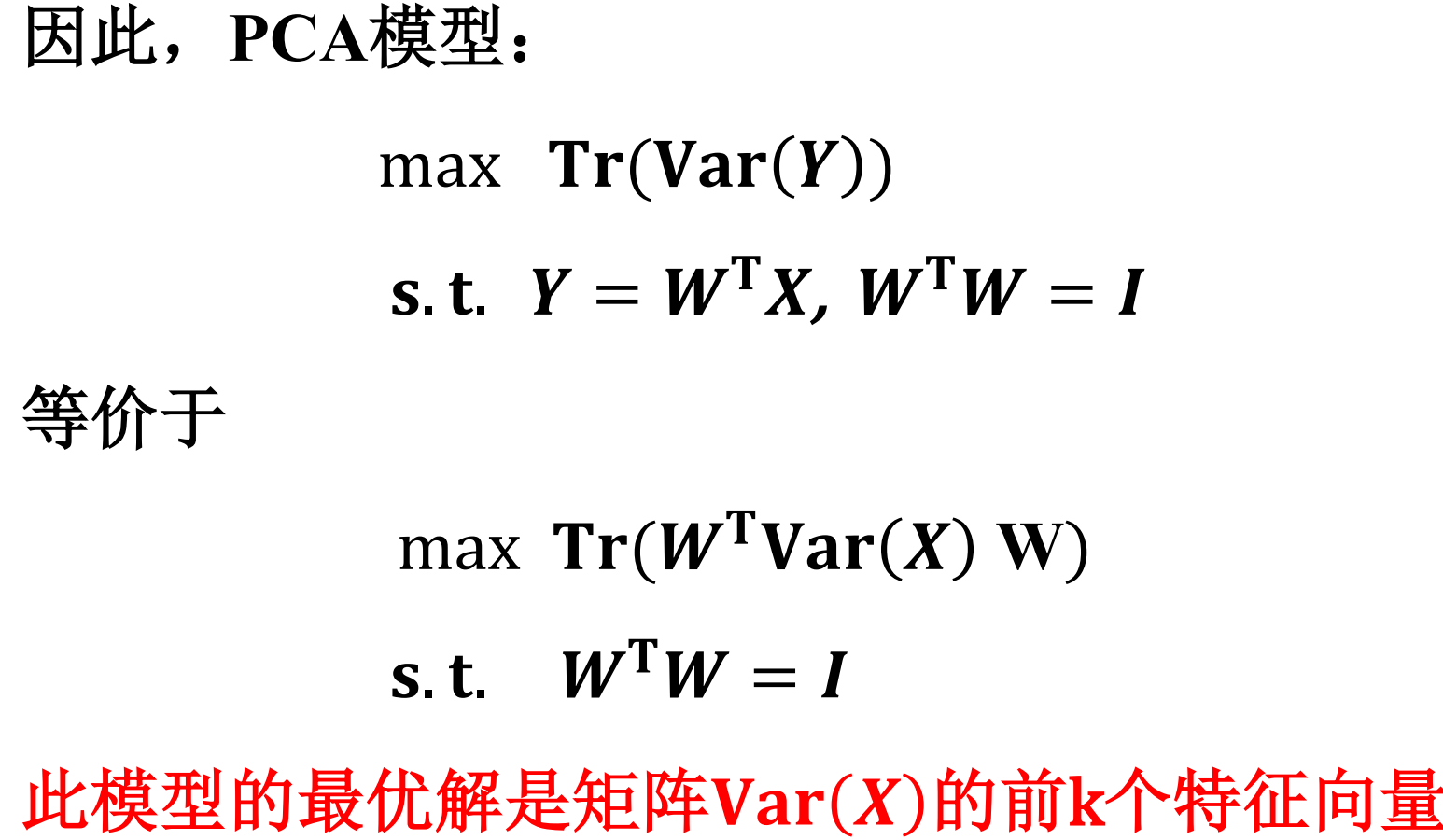
核心思想:通过正交变换将一组可能存在相 关性的变量转换为一组线性不相关的变量, 达到数据压缩的目的。 即,寻找合适的正交投影矩阵 W,使得投影 之后的样本 方差达到最大。
主成分分析(Principal Component Analysis, PCA)目标函数——新坐标系最大化数据新表征的方差:
假设 是经过变换之后的数据
PCA的缺点
- 在数据完全未知的情况下,PCA变换不能得到较好的保留数据信息
- 对降维得到到最终数据数目不能很好地估计
- 假设相关性是线性的,对于非线性的依赖关系不能得到较好的结果
- 假设变量服从高斯分布
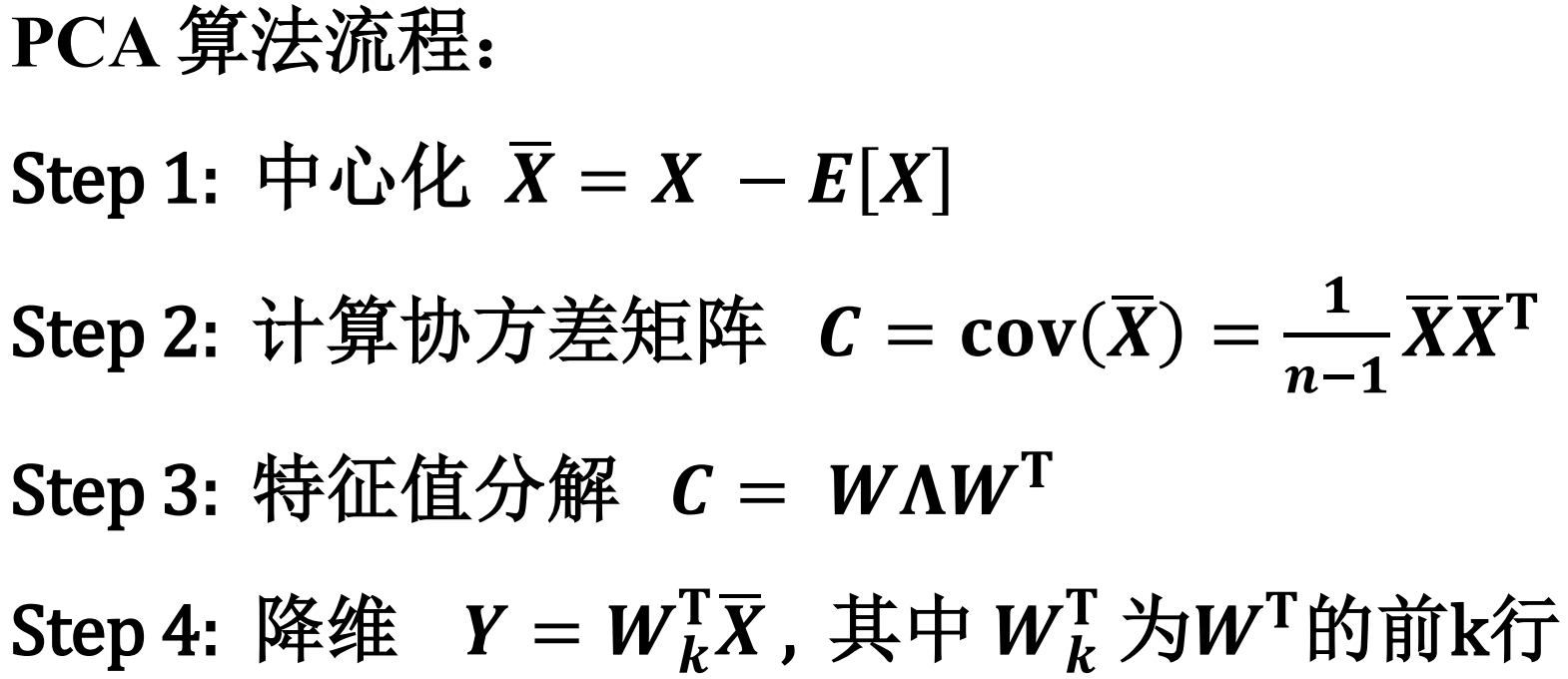
对协方差矩阵求出来的特征向量,就是新坐标轴方向、数据的旋转方向或者说是新的主成分方向。
对协方差矩阵求出来的特征值,就是数据在对应新坐标轴上投影的方差大小,或者说是其对应特征向量上包含的信息量。
PCA在考虑数据降维时候希望在新空间的信息越多越好,即低维嵌入(embedding)的方差(协方差矩阵的迹)越大。
• PCA是一个无监督降维方法(Unsupervised DR) , 并没有运用任何有监督信息 ( Supervised Information),这也是PCA算法一个弊端。
• 对于一个分类问题,保留信息越多分类效果一定 会更好么? – 不一定,分类效果完全取决样本在新的子空间下的可区分度。
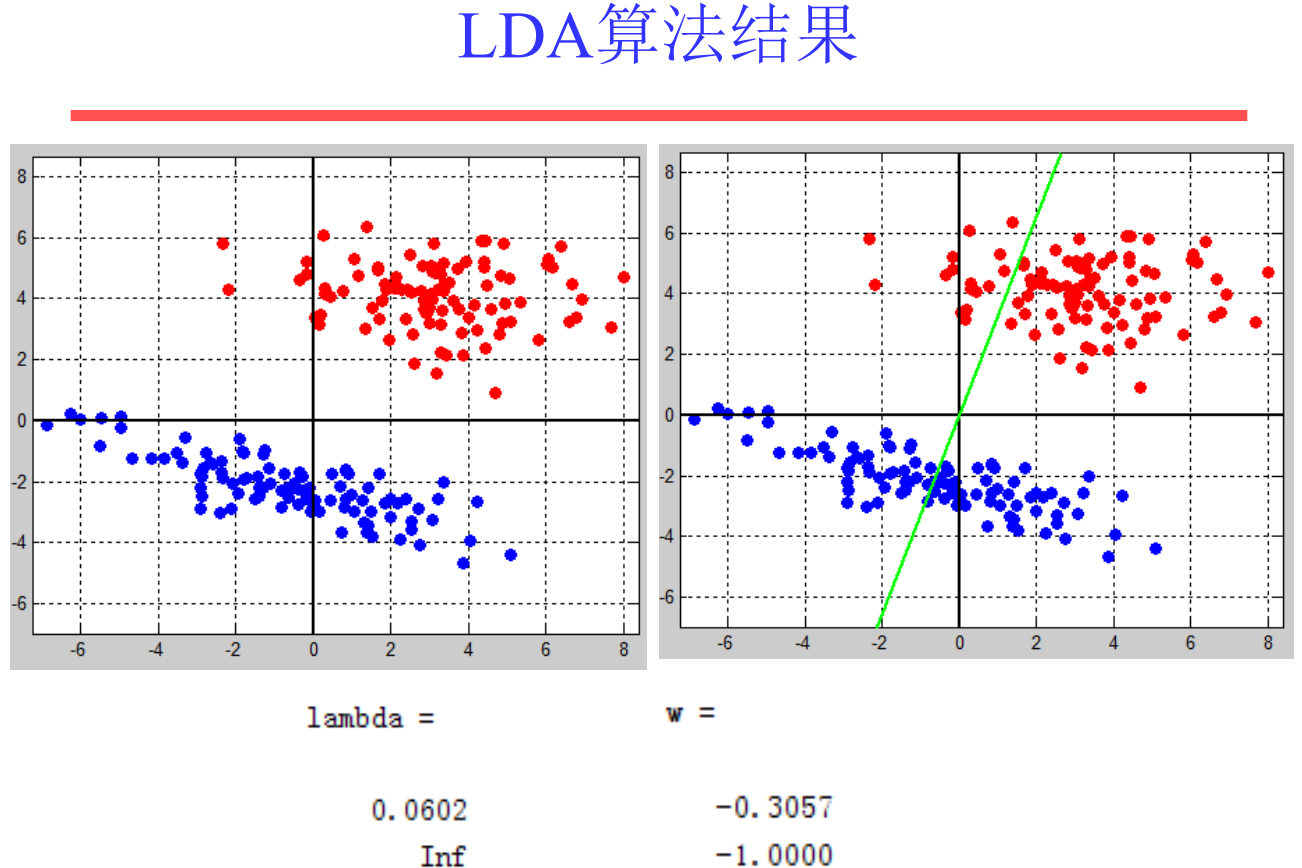
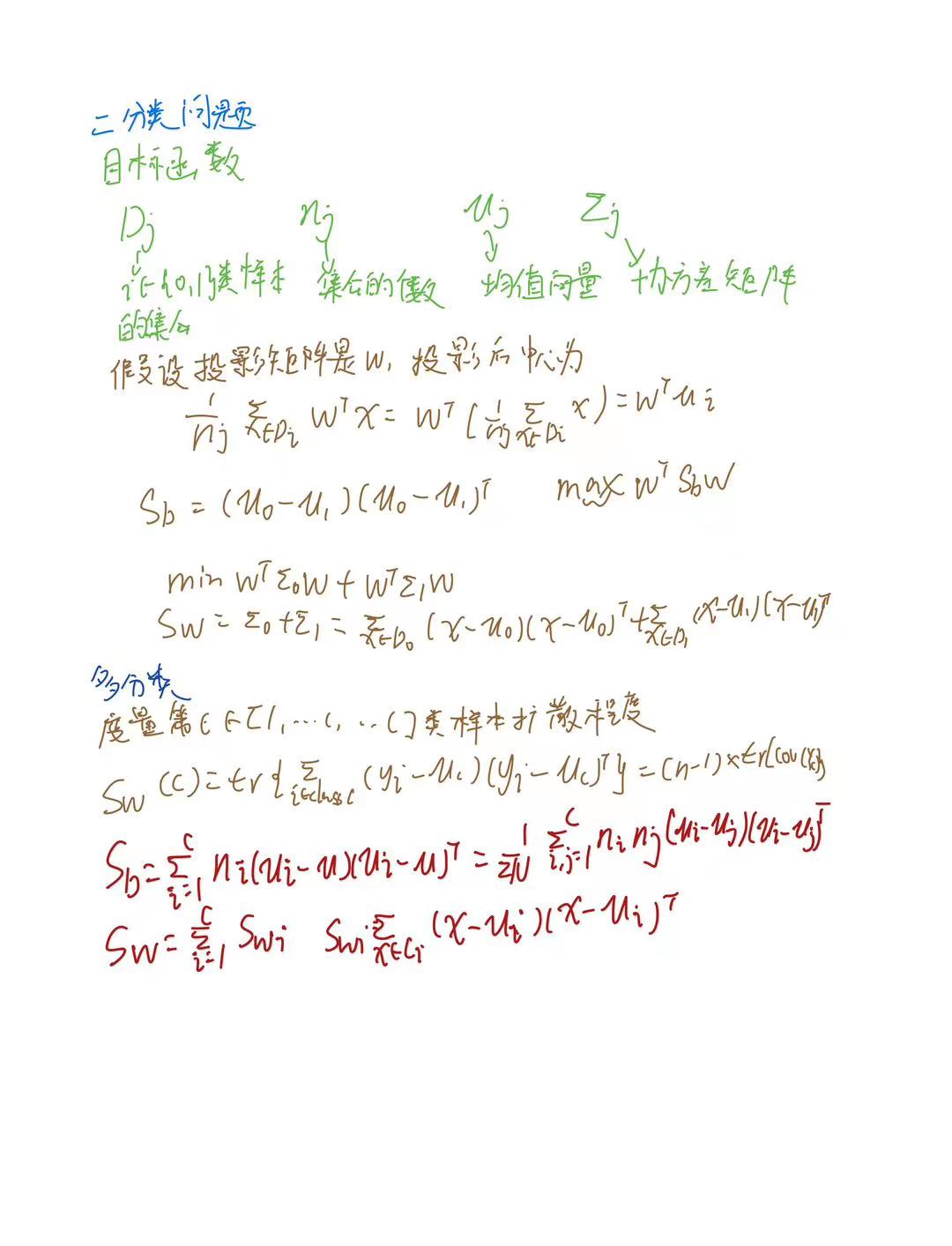
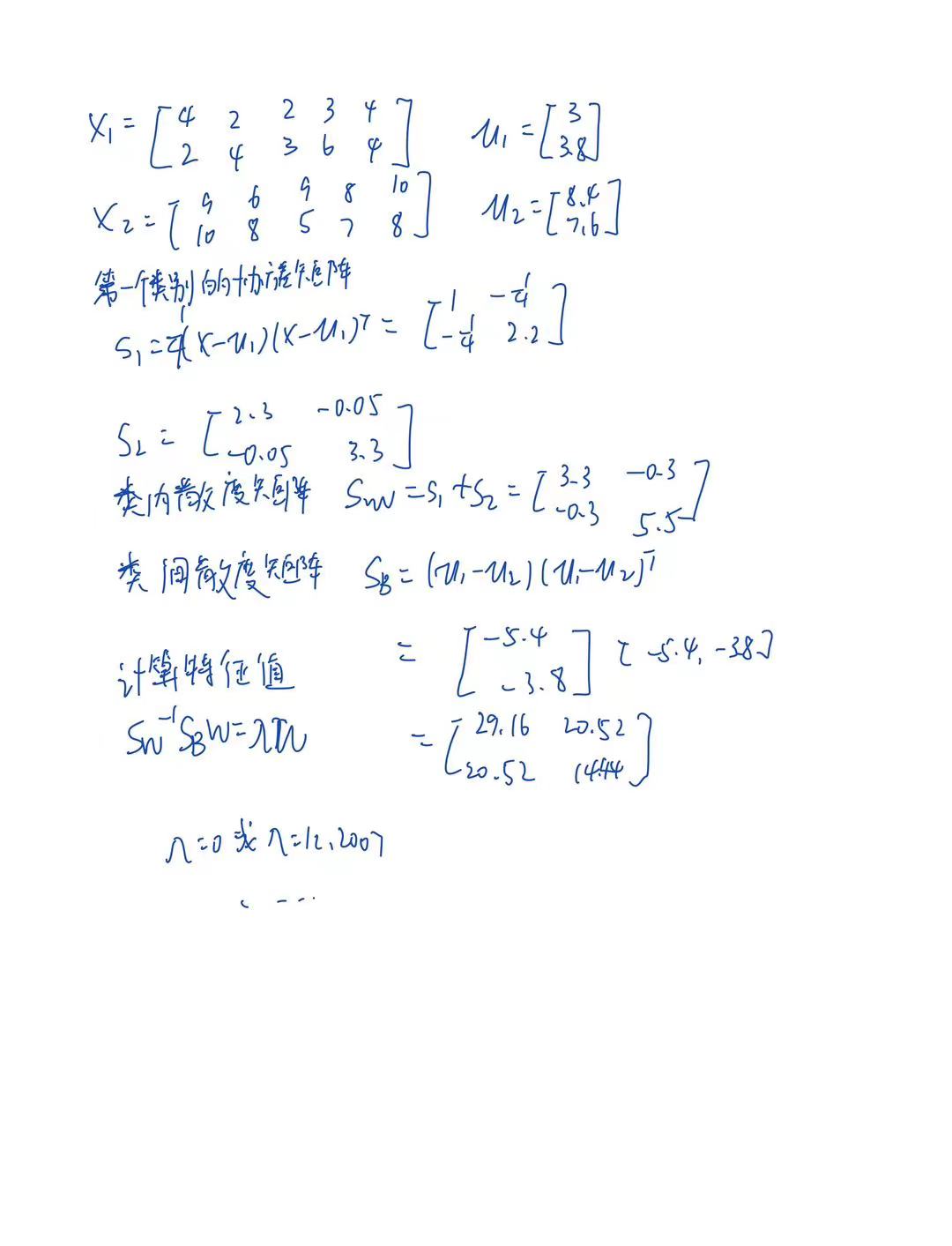
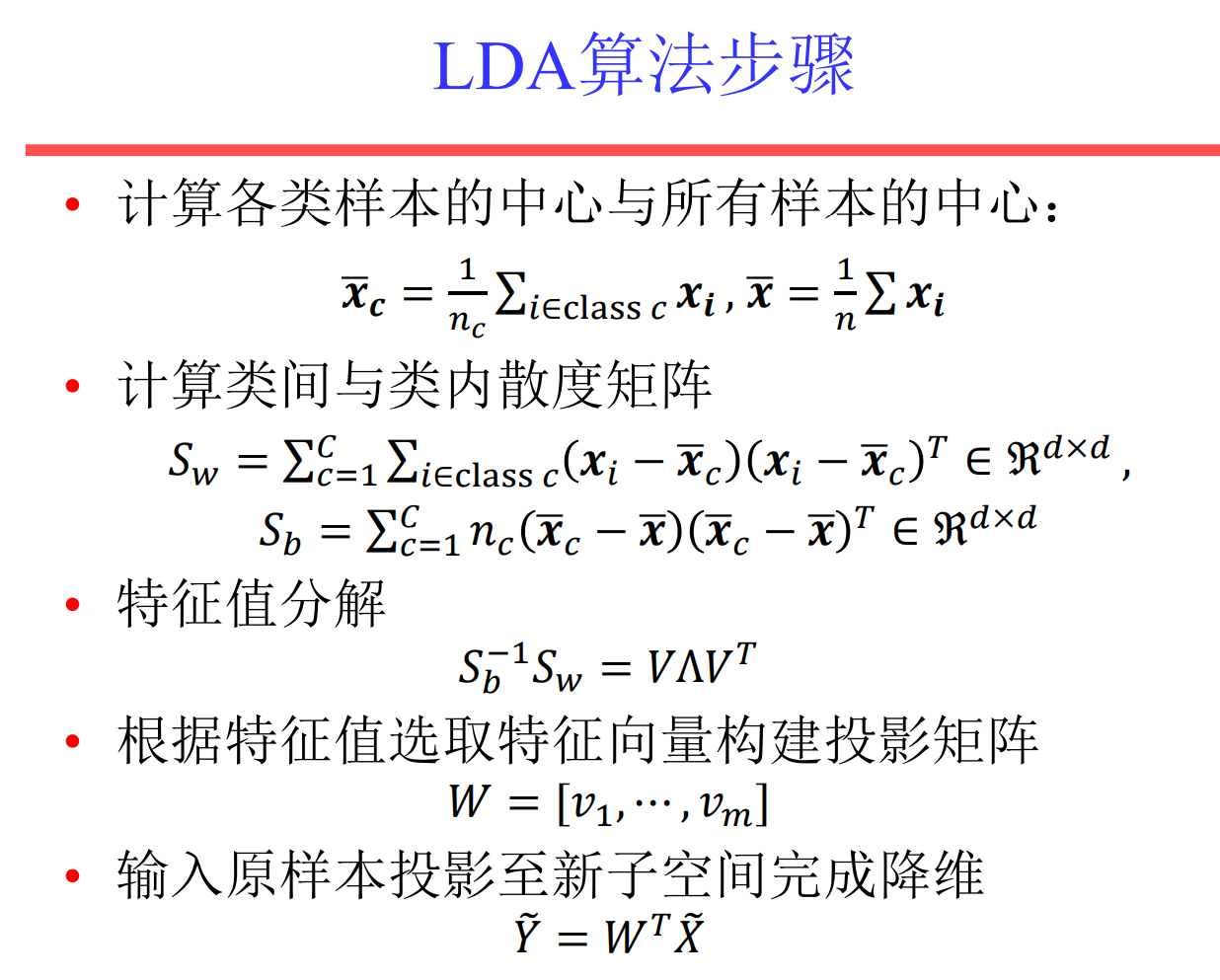
LDA
降维+分类
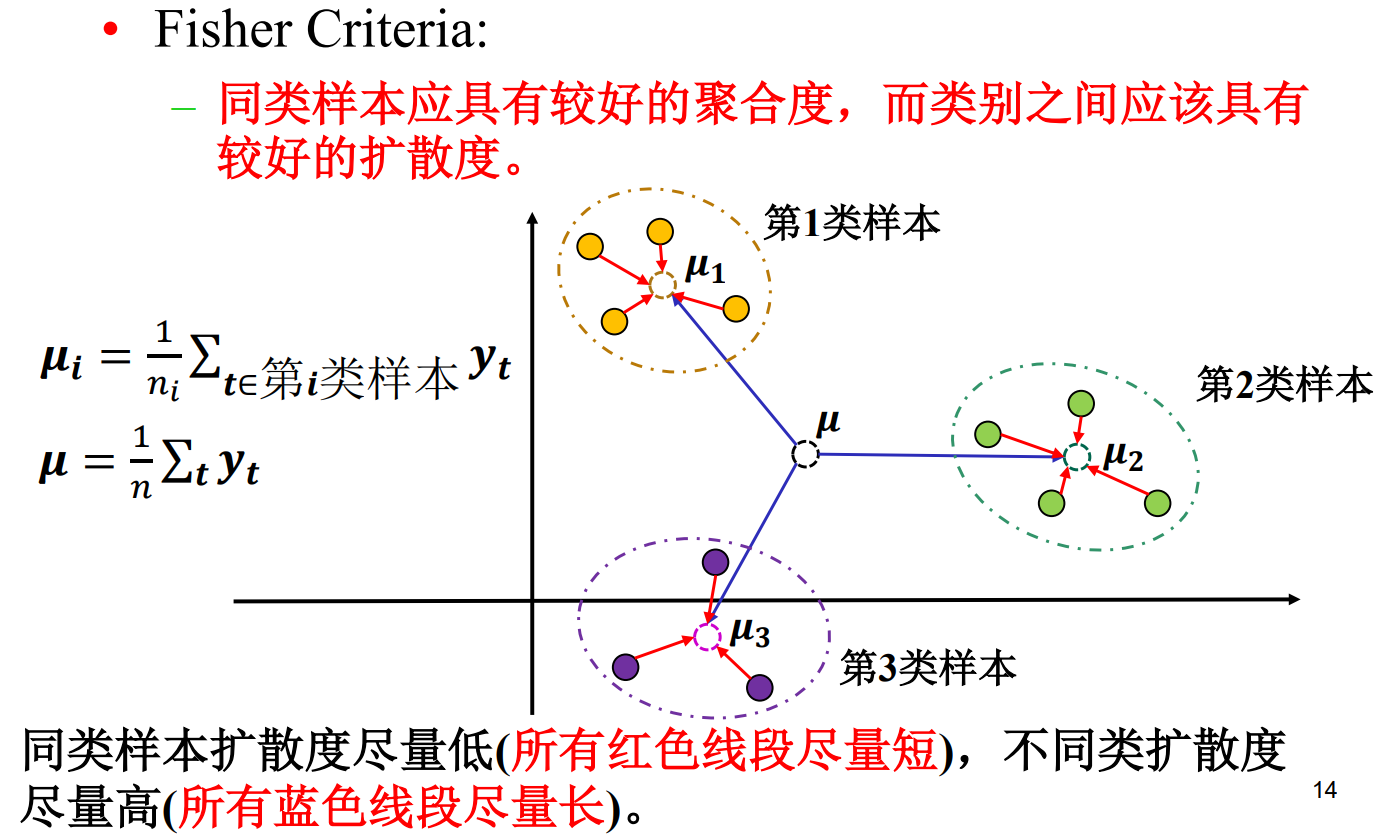
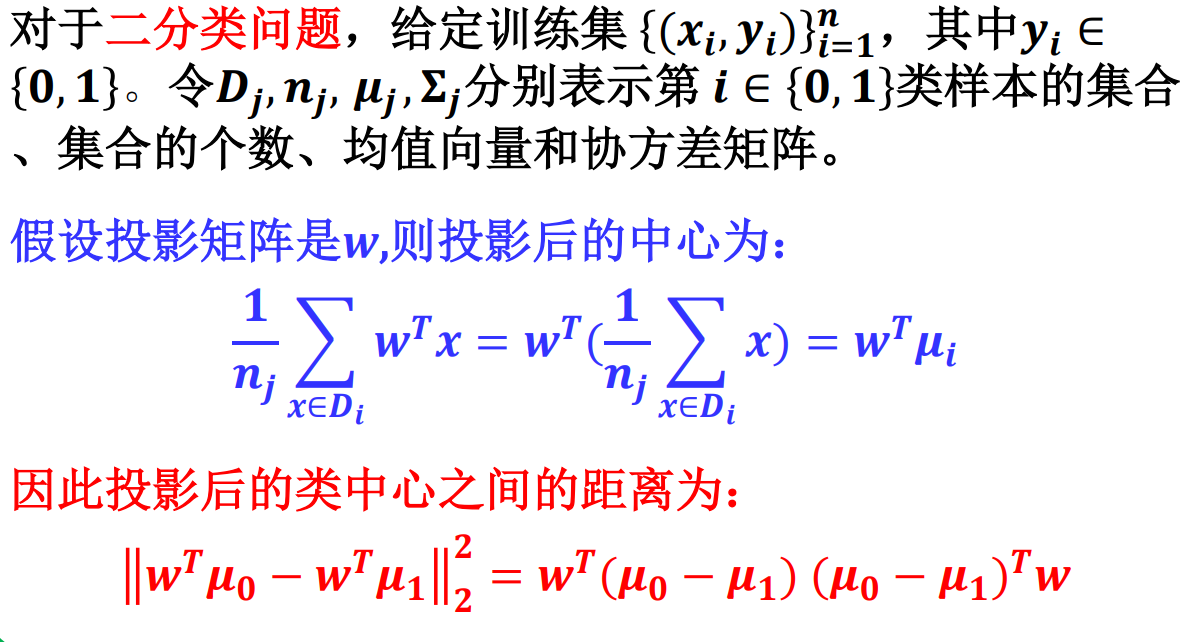
假设降维的目的是解决维度灾难,在低维空间进行分类。那么我们希望降维后的样本保持一定的可分性,即经过投影之后,同类样本的投影点尽可能接近,异类样本的投影点尽可能远离 。
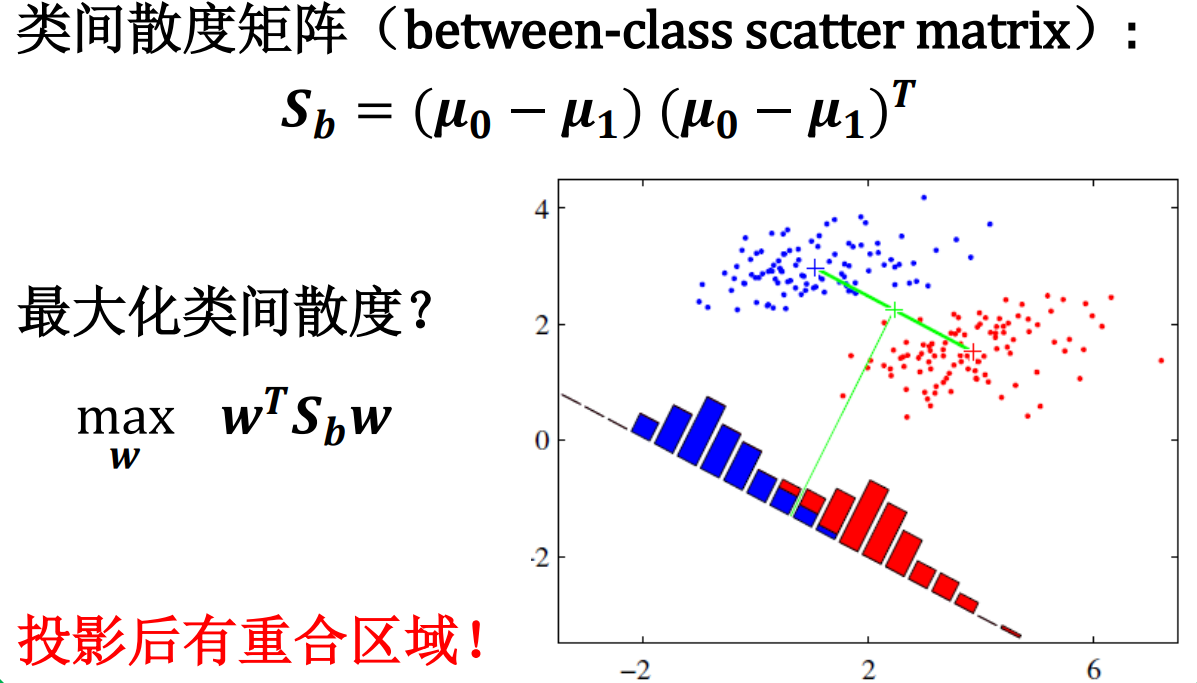
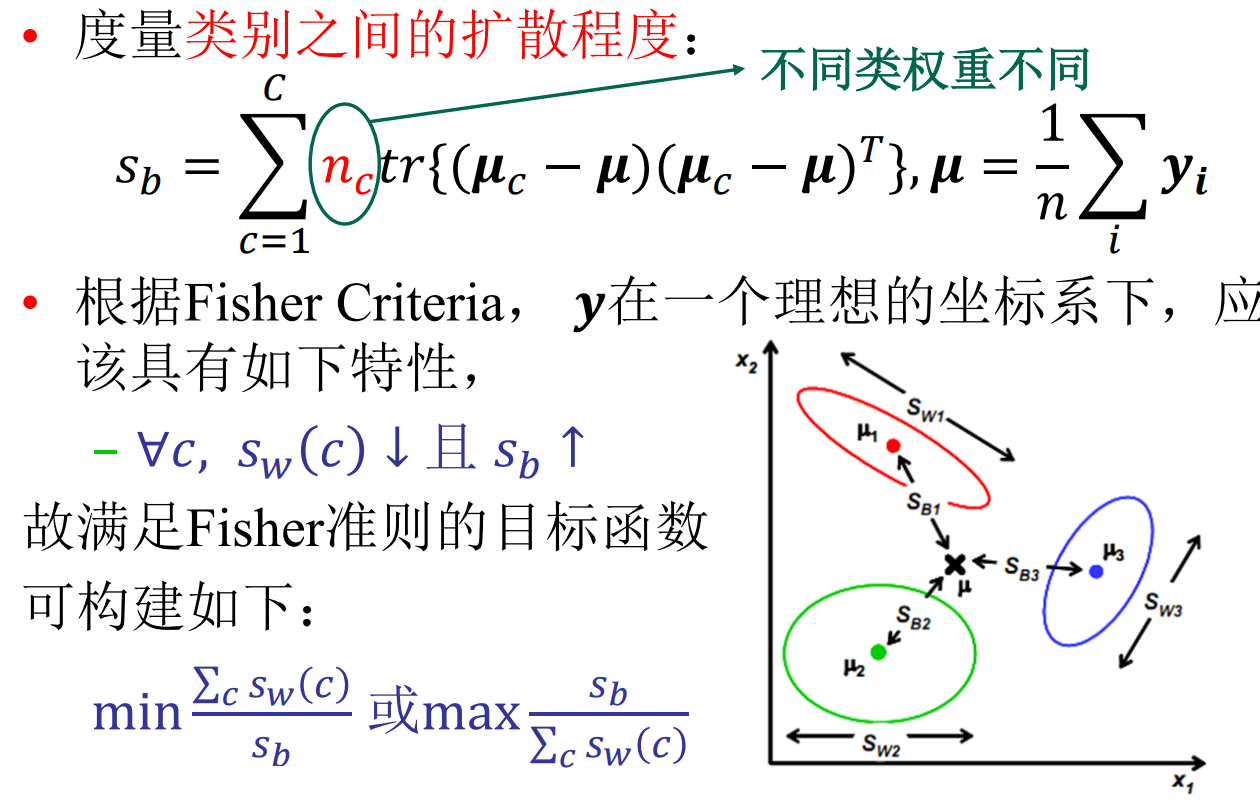
让投影后的类中心之间的距离尽可能大,从而增强样本的可分性。
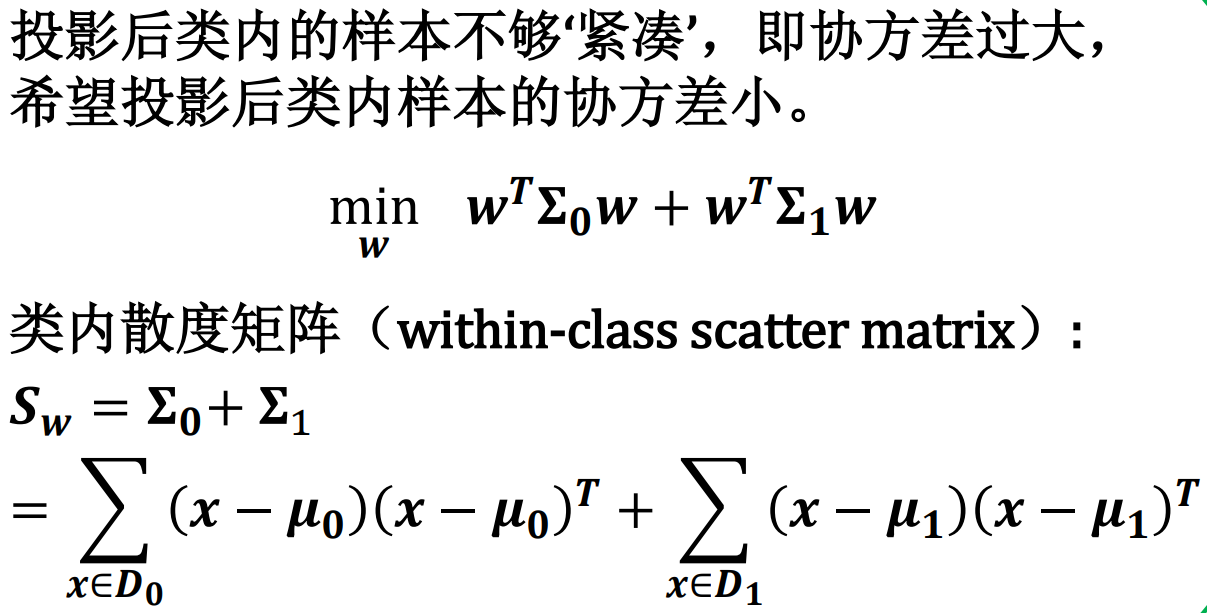
同类样本应该尽量聚合在一起,而不同类样本之间 应该尽量扩散。
由于线性判别分析用到fisher criteria,所以又称费舍儿判别 分析(Fisher Discriminant Analysis, FDA)!
𝑆𝑆 𝑏𝑏不满秩,没有矩阵逆,LDA求解不稳定。
解决方案? – 正则化 – 先PCA后LDA
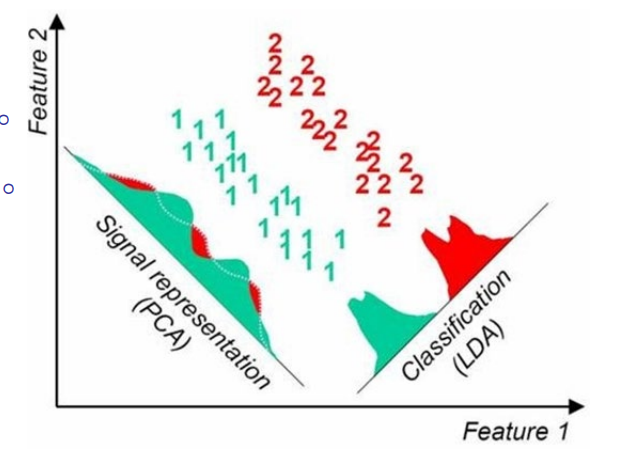
PCA与LDA对比
– PCA旨在寻找一组子坐标系(定义一个子空间)使得样本点的方差最大,即信息量保留越多。
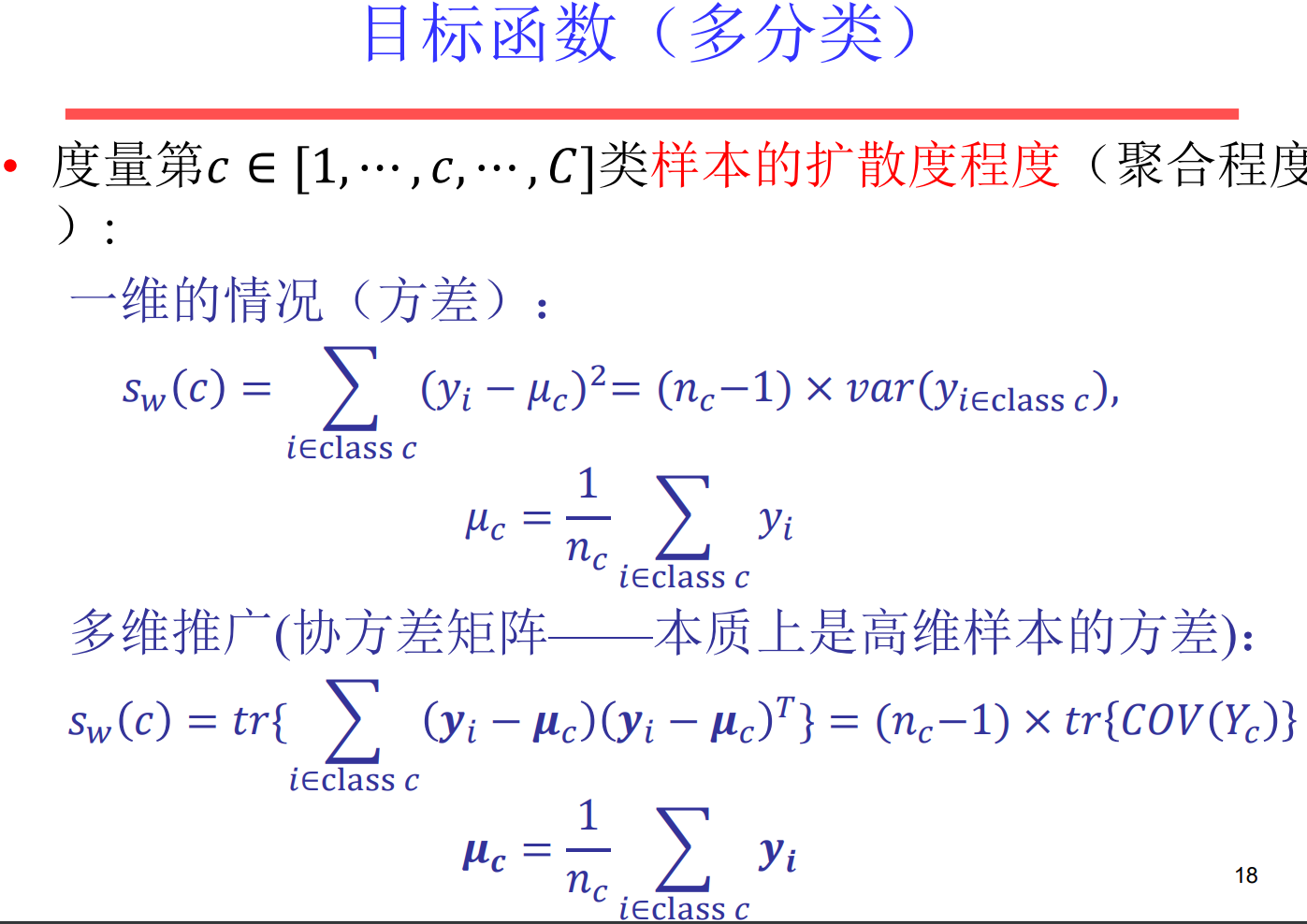
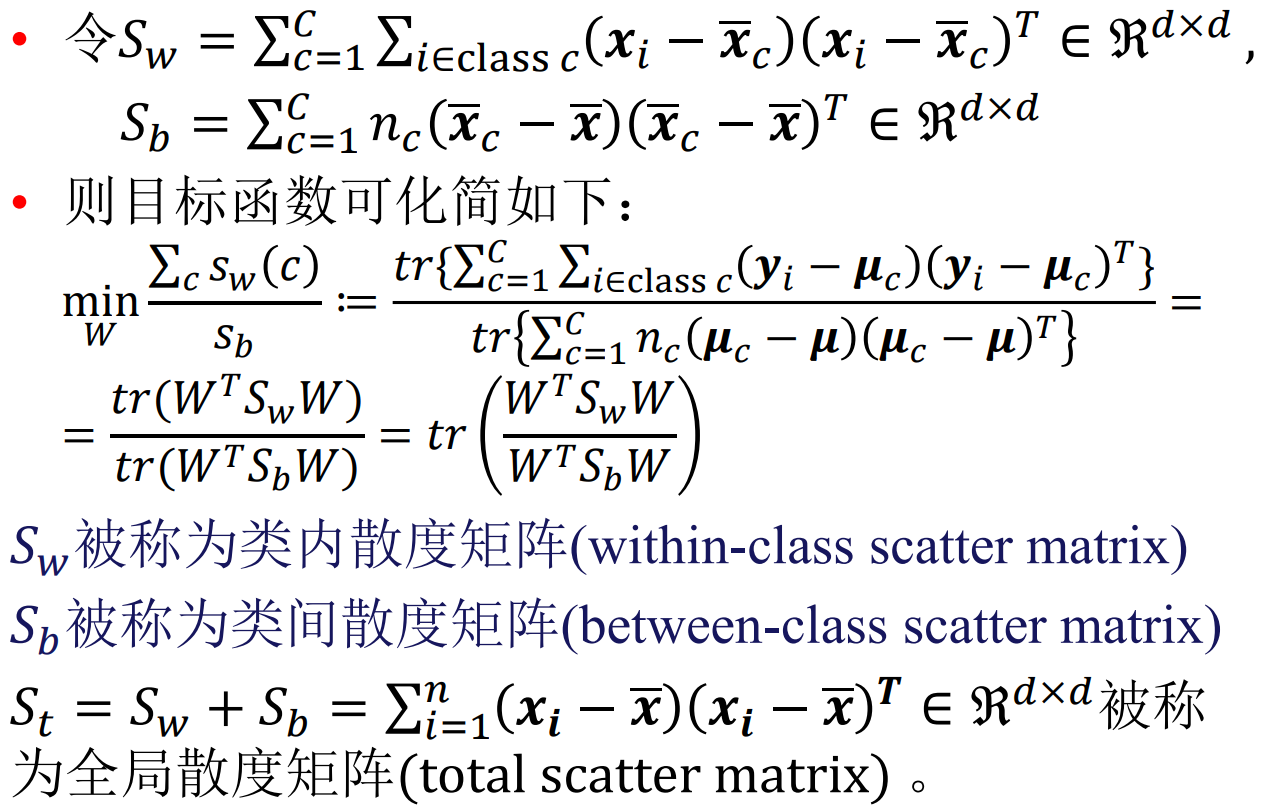
– LDA旨在寻找一组子坐标系(定义一个子空间)使得样本点类内散度越小,类间散度越大(Fisher Criteria)。
监督性: – PCA是无监督学习方法。 – LDA是有监督学习方法。
算法效率 – PCA效率更胜一筹